 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Image-based 6-DOF Localization in Large-Scale Environments
Paper and Code
Mar 27, 2012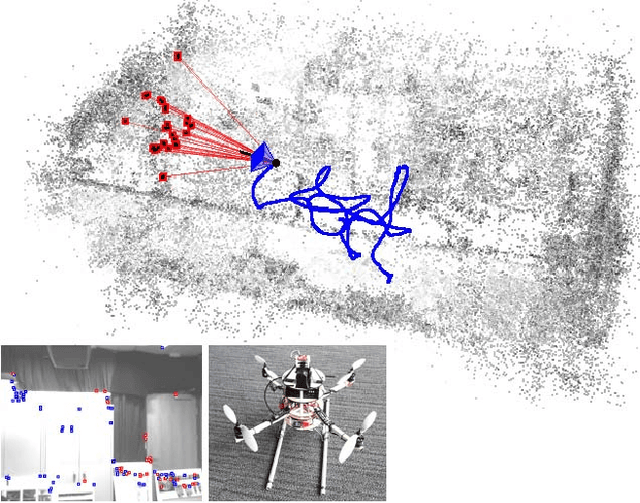
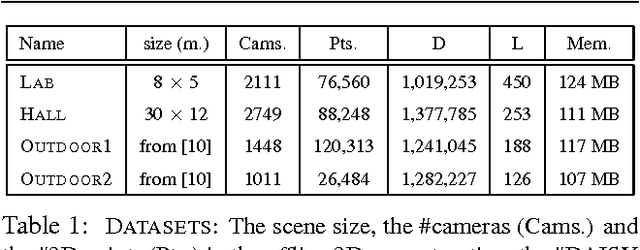
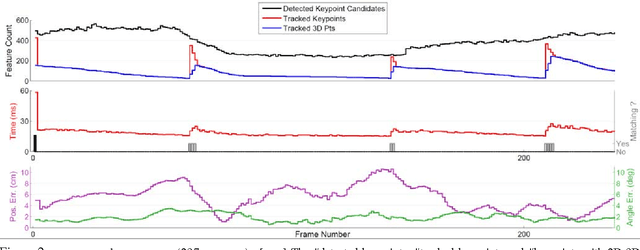
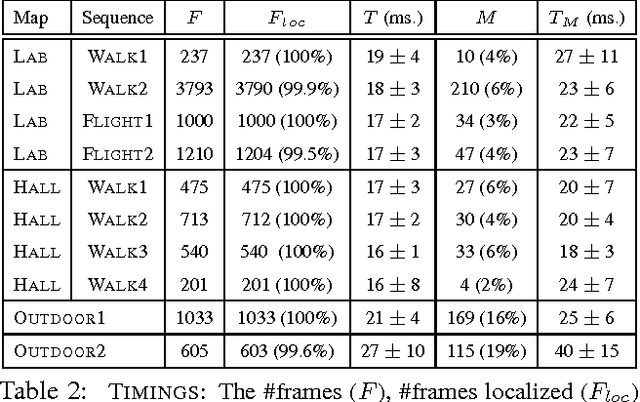
We present a real-time approach for image-based localization within large scenes that have been reconstructed offline using structure from motion (Sfm). From monocular video, our method continuously computes a precise 6-DOF camera pose, by efficiently tracking natural features and matching them to 3D points in the Sfm point cloud. Our main contribution lies in efficiently interleaving a fast keypoint tracker that uses inexpensive binary feature descriptors with a new approach for direct 2D-to-3D matching. The 2D-to-3D matching avoids the need for online extraction of scale-invariant features. Instead, offline we construct an indexed database containing multiple DAISY descriptors per 3D point extracted at multiple scales. The key to the efficiency of our method lies in invoking DAISY descriptor extraction and matching sparingly during localization, and in distributing this computation over a window of successive frames. This enables the algorithm to run in real-time, without fluctuations in the latency over long durations. We evaluate the method in large indoor and outdoor scenes. Our algorithm runs at over 30 Hz on a laptop and at 12 Hz on a low-power, mobile computer suitable for onboard computation on a quadrotor micro aerial vehicle.