 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Fusion Network for RGB-D Semantic Segmentation Incorporating Unexpected Obstacle Detection for Road-driving Images
Paper and Code
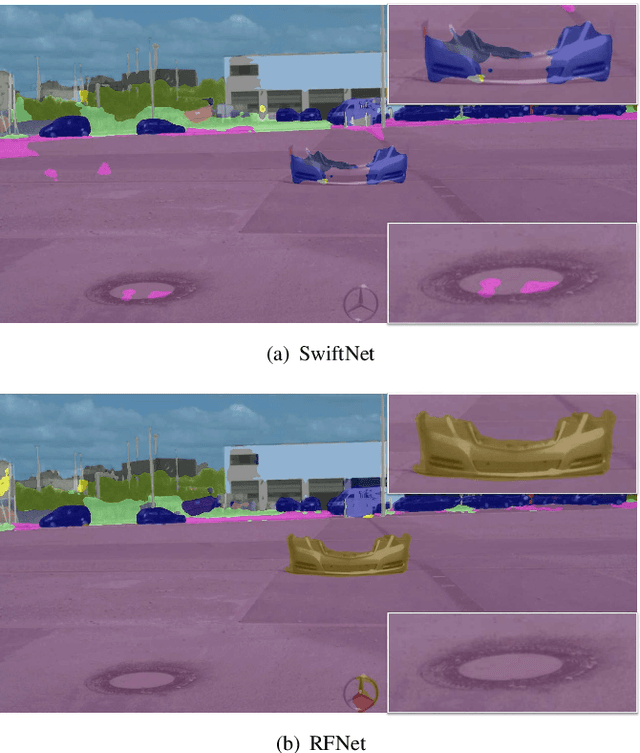
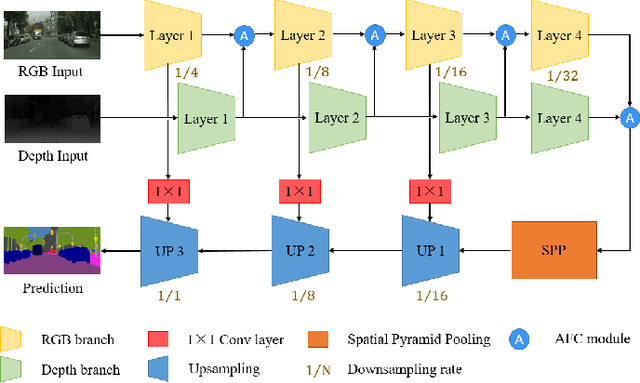
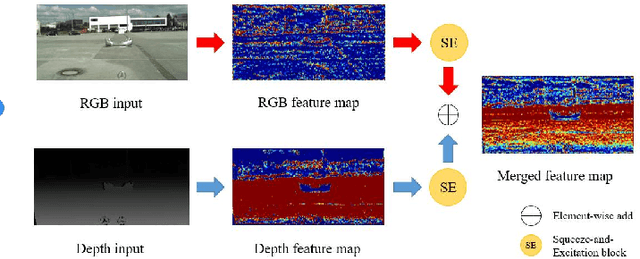
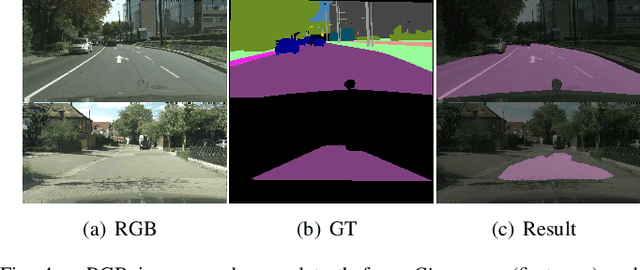
Semantic segmentation has made striking progress due to the success of deep convolutional neural networks. Considering the demand of autonomous driving, real-time semantic segmentation has become a research hotspot these years. However, few real-time RGB-D fusion semantic segmentation studies are carried out despite readily accessible depth information nowadays. In this paper, we propose a real-time fusion semantic segmentation network termed RFNet that efficiently exploits complementary features from depth information to enhance the performance in an attention-augmented way, while running swiftly that is a necessity for autonomous vehicles applications. Multi-dataset training is leveraged to incorporate unexpected small obstacle detection, enriching the recognizable classes required to face unforeseen hazards in the real world. A comprehensive set of experiments demonstrates the effectiveness of our framework. On \textit{Cityscapes}, Our method outperforms previous state-of-the-art semantic segmenters, with excellent accuracy and 22Hz inference speed at the full 2048$\times$1024 resolution, outperforming most existing RGB-D networks.