 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal time enhancement of operator's ergonomics in physical human - robot collaboration scenarios using a multi-stereo camera system
Paper and Code
Apr 11, 2023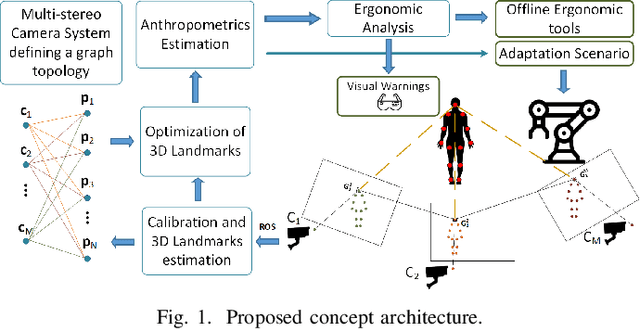
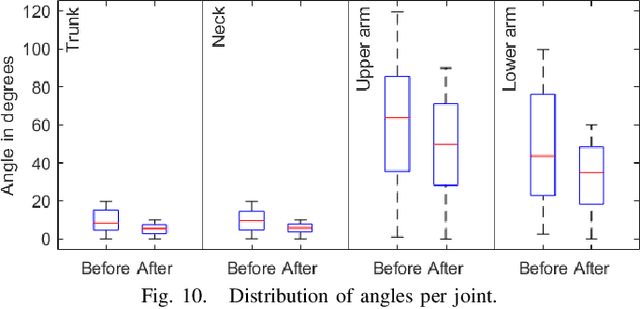
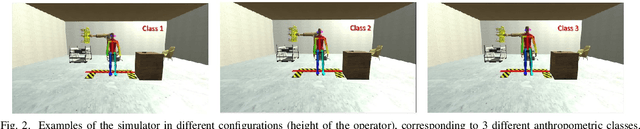
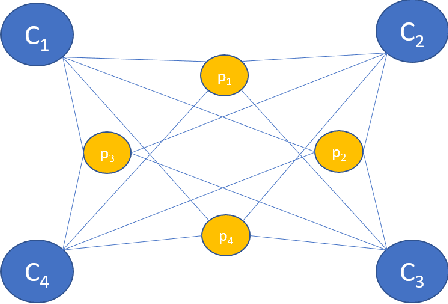
In collaborative tasks where humans work alongside machines, the robot's movements and behaviour can have a significant impact on the operator's safety, health, and comfort. To address this issue, we present a multi-stereo camera system that continuously monitors the operator's posture while they work with the robot. This system uses a novel distributed fusion approach to assess the operator's posture in real-time and to help avoid uncomfortable or unsafe positions. The system adjusts the robot's movements and informs the operator of any incorrect or potentially harmful postures, reducing the risk of accidents, strain, and musculoskeletal disorders. The analysis is personalized, taking into account the unique anthropometric characteristics of each operator, to ensure optimal ergonomics. The results of our experiments show that the proposed approach leads to improved human body postures and offers a promising solution for enhancing the ergonomics of operators in collaborative tasks.