 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReachability Analysis of Neural Feedback Loops
Paper and Code
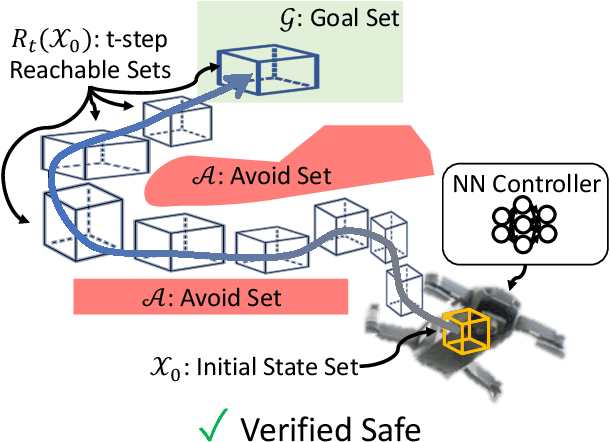

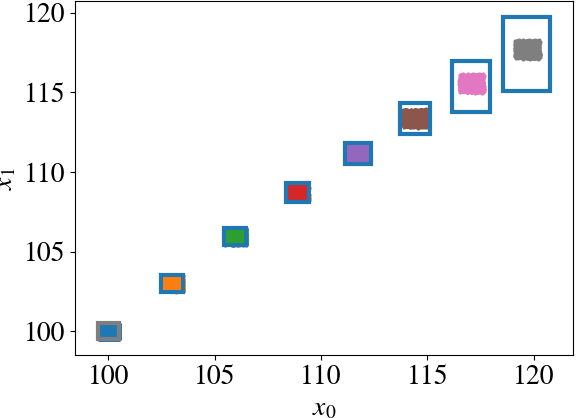
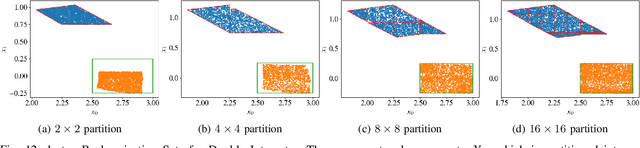
Neural Networks (NNs) can provide major empirical performance improvements for closed-loop systems, but they also introduce challenges in formally analyzing those systems' safety properties. In particular, this work focuses on estimating the forward reachable set of \textit{neural feedback loops} (closed-loop systems with NN controllers). Recent work provides bounds on these reachable sets, but the computationally tractable approaches yield overly conservative bounds (thus cannot be used to verify useful properties), and the methods that yield tighter bounds are too intensive for online computation. This work bridges the gap by formulating a convex optimization problem for the reachability analysis of closed-loop systems with NN controllers. While the solutions are less tight than previous (semidefinite program-based) methods, they are substantially faster to compute, and some of those computational time savings can be used to refine the bounds through new input set partitioning techniques, which is shown to dramatically reduce the tightness gap. The new framework is developed for systems with uncertainty (e.g., measurement and process noise) and nonlinearities (e.g., polynomial dynamics), and thus is shown to be applicable to real-world systems. To inform the design of an initial state set when only the target state set is known/specified, a novel algorithm for backward reachability analysis is also provided, which computes the set of states that are guaranteed to lead to the target set. The numerical experiments show that our approach (based on linear relaxations and partitioning) gives a $5\times$ reduction in conservatism in $150\times$ less computation time compared to the state-of-the-art. Furthermore, experiments on quadrotor, 270-state, and polynomial systems demonstrate the method's ability to handle uncertainty sources, high dimensionality, and nonlinear dynamics, respectively.