 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapidly Converging Time-Discounted Ergodicity on Graphs for Active Inspection of Confined Spaces
Paper and Code
Mar 13, 2025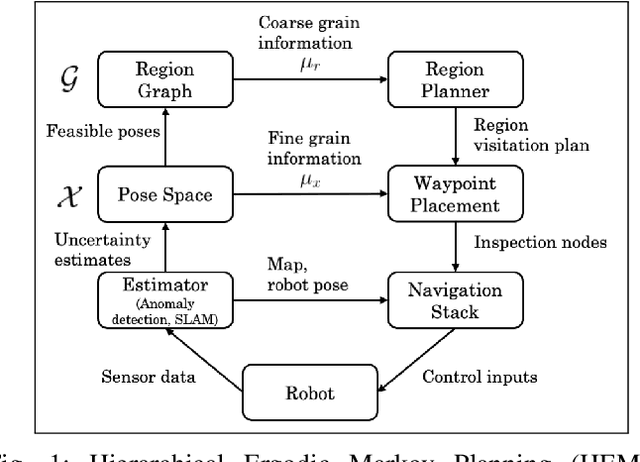
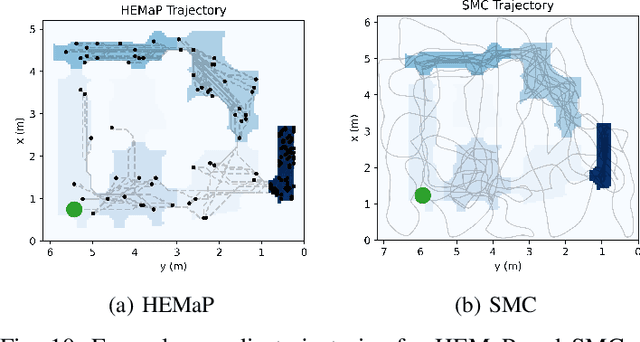
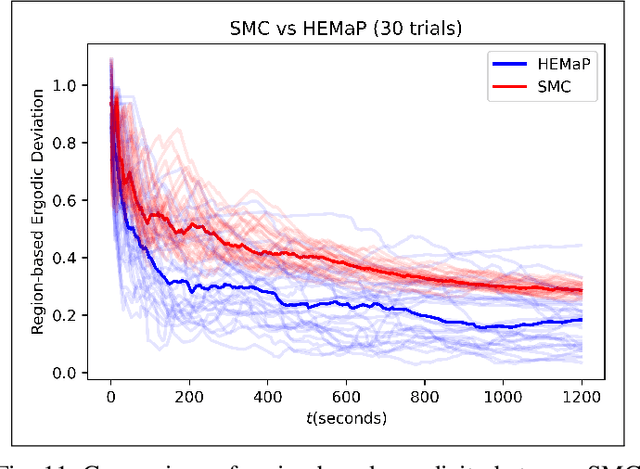
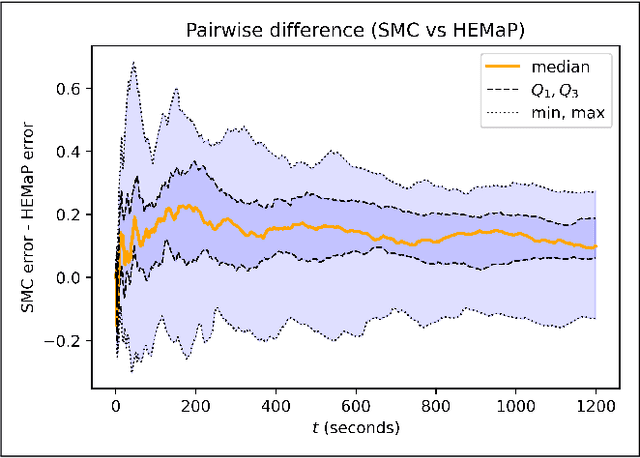
Ergodic exploration has spawned a lot of interest in mobile robotics due to its ability to design time trajectories that match desired spatial coverage statistics. However, current ergodic approaches are for continuous spaces, which require detailed sensory information at each point and can lead to fractal-like trajectories that cannot be tracked easily. This paper presents a new ergodic approach for graph-based discretization of continuous spaces. It also introduces a new time-discounted ergodicity metric, wherein early visitations of information-rich nodes are weighted more than late visitations. A Markov chain synthesized using a convex program is shown to converge more rapidly to time-discounted ergodicity than the traditional fastest mixing Markov chain. The resultant ergodic traversal method is used within a hierarchical framework for active inspection of confined spaces with the goal of detecting anomalies robustly using SLAM-driven Bayesian hypothesis testing. Both simulation and physical experiments on a ground robot show the advantages of this framework over greedy and random exploration methods for left-behind foreign object debris detection in a ballast tank.