 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid Task-Solving in Novel Environments
Paper and Code
Jun 05, 2020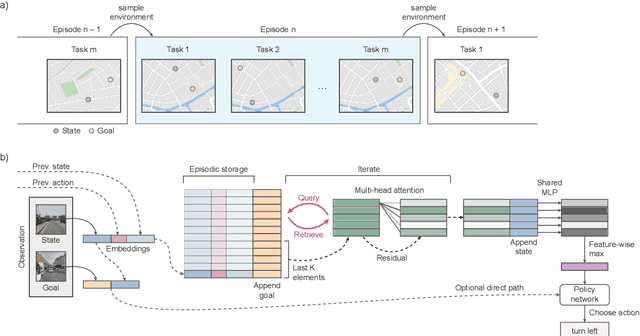
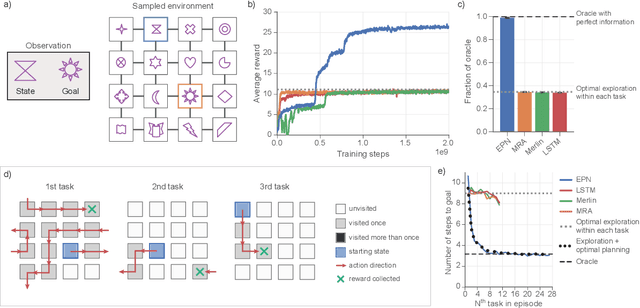
When thrust into an unfamiliar environment and charged with solving a series of tasks, an effective agent should (1) leverage prior knowledge to solve its current task while (2) efficiently exploring to gather knowledge for use in future tasks, and then (3) plan using that knowledge when faced with new tasks in that same environment. We introduce two domains for conducting research on this challenge, and find that state-of-the-art deep reinforcement learning (RL) agents fail to plan in novel environments. We develop a recursive implicit planning module that operates over episodic memories, and show that the resulting deep-RL agent is able to explore and plan in novel environments, outperforming the nearest baseline by factors of 2-3 across the two domains. We find evidence that our module (1) learned to execute a sensible information-propagating algorithm and (2) generalizes to situations beyond its training experience.