 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRangeDet:In Defense of Range View for LiDAR-based 3D Object Detection
Paper and Code
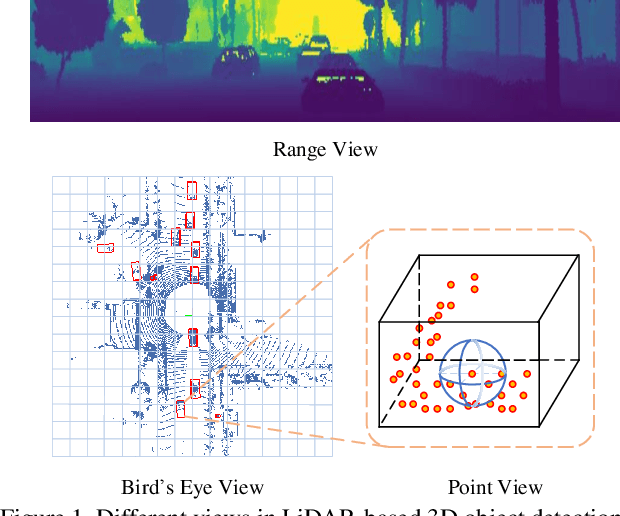
In this paper, we propose an anchor-free single-stage LiDAR-based 3D object detector -- RangeDet. The most notable difference with previous works is that our method is purely based on the range view representation. Compared with the commonly used voxelized or Bird's Eye View (BEV) representations, the range view representation is more compact and without quantization error. Although there are works adopting it for semantic segmentation, its performance in object detection is largely behind voxelized or BEV counterparts. We first analyze the existing range-view-based methods and find two issues overlooked by previous works: 1) the scale variation between nearby and far away objects; 2) the inconsistency between the 2D range image coordinates used in feature extraction and the 3D Cartesian coordinates used in output. Then we deliberately design three components to address these issues in our RangeDet. We test our RangeDet in the large-scale Waymo Open Dataset (WOD). Our best model achieves 72.9/75.9/65.8 3D AP on vehicle/pedestrian/cyclist. These results outperform other range-view-based methods by a large margin (~20 3D AP in vehicle detection), and are overall comparable with the state-of-the-art multi-view-based methods. Codes will be public.