 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAMBO: RL-augmented Model-based Optimal Control for Whole-body Loco-manipulation
Paper and Code
Apr 09, 2025
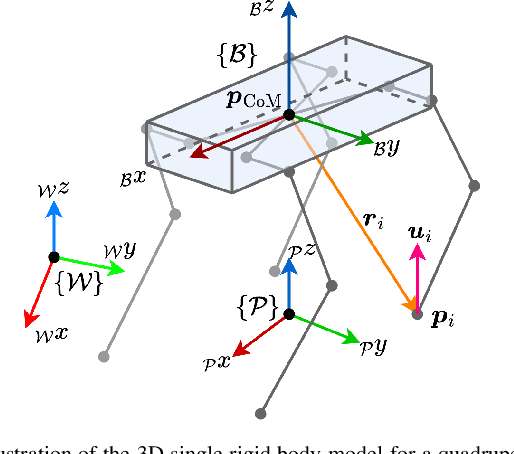
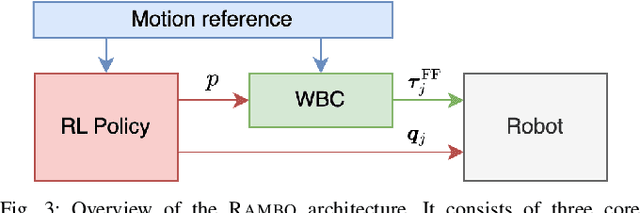

Loco-manipulation -- coordinated locomotion and physical interaction with objects -- remains a major challenge for legged robots due to the need for both accurate force interaction and robustness to unmodeled dynamics. While model-based controllers provide interpretable dynamics-level planning and optimization, they are limited by model inaccuracies and computational cost. In contrast, learning-based methods offer robustness while struggling with precise modulation of interaction forces. We introduce RAMBO -- RL-Augmented Model-Based Optimal Control -- a hybrid framework that integrates model-based reaction force optimization using a simplified dynamics model and a feedback policy trained with reinforcement learning. The model-based module generates feedforward torques by solving a quadratic program, while the policy provides feedback residuals to enhance robustness in control execution. We validate our framework on a quadruped robot across a diverse set of real-world loco-manipulation tasks -- such as pushing a shopping cart, balancing a plate, and holding soft objects -- in both quadrupedal and bipedal walking. Our experiments demonstrate that RAMBO enables precise manipulation while achieving robust and dynamic locomotion, surpassing the performance of policies trained with end-to-end scheme. In addition, our method enables flexible trade-off between end-effector tracking accuracy with compliance.