 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProxyFormer: Proxy Alignment Assisted Point Cloud Completion with Missing Part Sensitive Transformer
Paper and Code
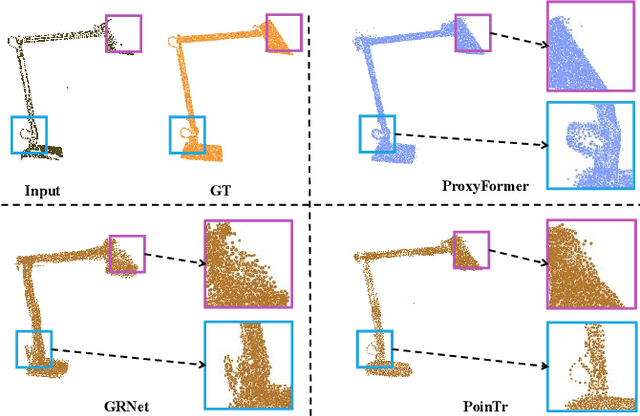



Problems such as equipment defects or limited viewpoints will lead the captured point clouds to be incomplete. Therefore, recovering the complete point clouds from the partial ones plays an vital role in many practical tasks, and one of the keys lies in the prediction of the missing part. In this paper, we propose a novel point cloud completion approach namely ProxyFormer that divides point clouds into existing (input) and missing (to be predicted) parts and each part communicates information through its proxies. Specifically, we fuse information into point proxy via feature and position extractor, and generate features for missing point proxies from the features of existing point proxies. Then, in order to better perceive the position of missing points, we design a missing part sensitive transformer, which converts random normal distribution into reasonable position information, and uses proxy alignment to refine the missing proxies. It makes the predicted point proxies more sensitive to the features and positions of the missing part, and thus make these proxies more suitable for subsequent coarse-to-fine processes. Experimental results show that our method outperforms state-of-the-art completion networks on several benchmark datasets and has the fastest inference speed. Code is available at https://github.com/I2-Multimedia-Lab/ProxyFormer.