 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrompt-Driven Temporal Domain Adaptation for Nighttime UAV Tracking
Paper and Code
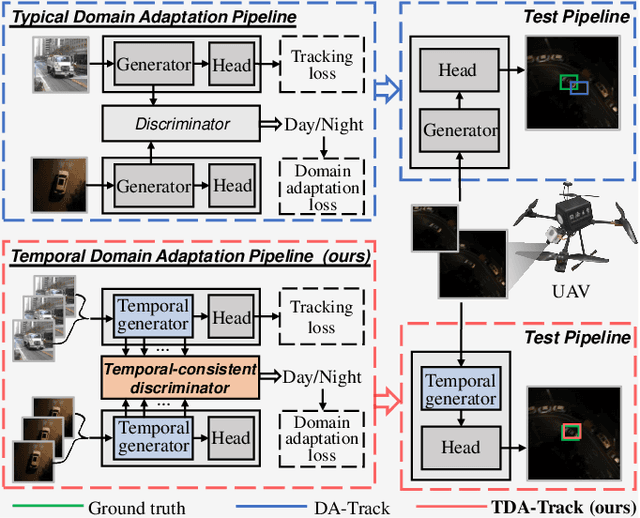


Nighttime UAV tracking under low-illuminated scenarios has achieved great progress by domain adaptation (DA). However, previous DA training-based works are deficient in narrowing the discrepancy of temporal contexts for UAV trackers. To address the issue, this work proposes a prompt-driven temporal domain adaptation training framework to fully utilize temporal contexts for challenging nighttime UAV tracking, i.e., TDA. Specifically, the proposed framework aligns the distribution of temporal contexts from daytime and nighttime domains by training the temporal feature generator against the discriminator. The temporal-consistent discriminator progressively extracts shared domain-specific features to generate coherent domain discrimination results in the time series. Additionally, to obtain high-quality training samples, a prompt-driven object miner is employed to precisely locate objects in unannotated nighttime videos. Moreover, a new benchmark for long-term nighttime UAV tracking is constructed. Exhaustive evaluations on both public and self-constructed nighttime benchmarks demonstrate the remarkable performance of the tracker trained in TDA framework, i.e., TDA-Track. Real-world tests at nighttime also show its practicality. The code and demo videos are available at https://github.com/vision4robotics/TDA-Track.