 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProgressive Self-Distillation for Ground-to-Aerial Perception Knowledge Transfer
Paper and Code
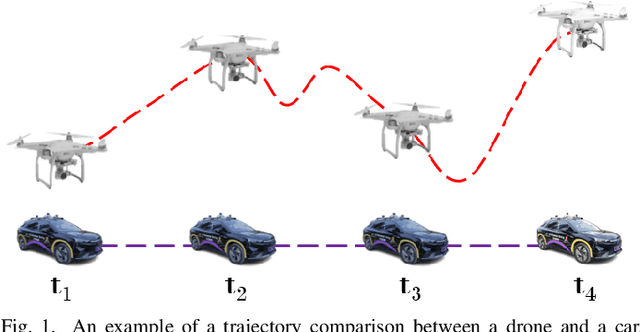
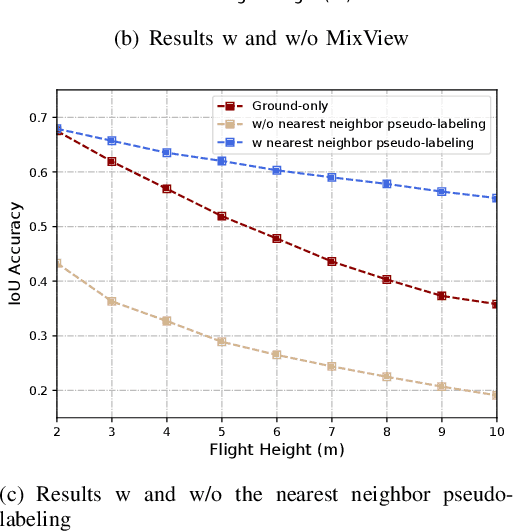
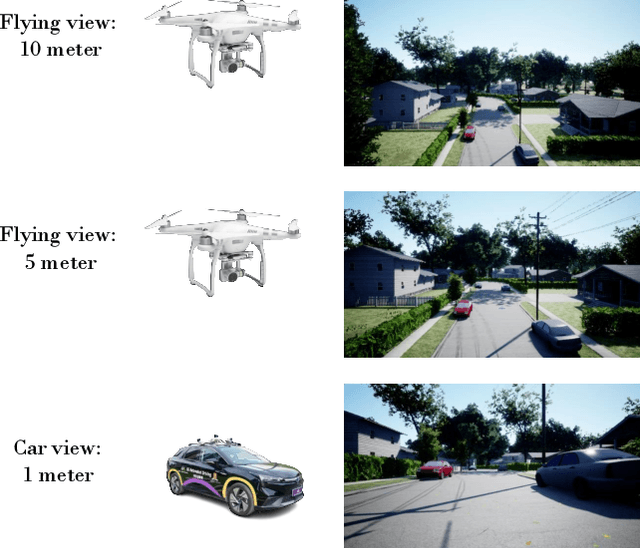
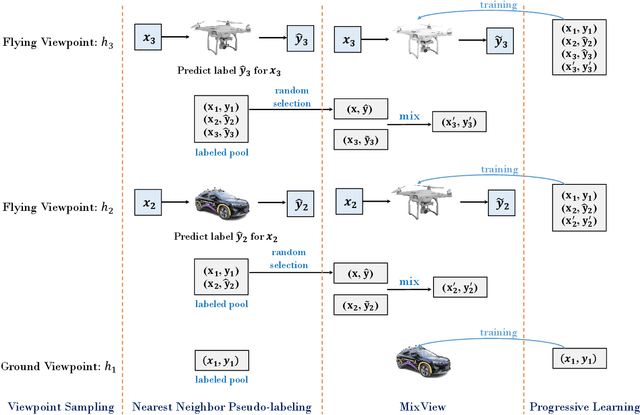
We study a practical yet hasn't been explored problem: how a drone can perceive in an environment from viewpoints of different flight heights. Unlike autonomous driving where the perception is always conducted from a ground viewpoint, a flying drone may flexibly change its flight height due to specific tasks, requiring capability for viewpoint invariant perception. To reduce the effort of annotation of flight data, we consider a ground-to-aerial knowledge distillation method while using only labeled data of ground viewpoint and unlabeled data of flying viewpoints. To this end, we propose a progressive semi-supervised learning framework which has four core components: a dense viewpoint sampling strategy that splits the range of vertical flight height into a set of small pieces with evenly-distributed intervals, and at each height we sample data from that viewpoint; the nearest neighbor pseudo-labeling that infers labels of the nearest neighbor viewpoint with a model learned on the preceding viewpoint; MixView that generates augmented images among different viewpoints to alleviate viewpoint difference; and a progressive distillation strategy to gradually learn until reaching the maximum flying height. We collect a synthesized dataset and a real-world dataset, and we perform extensive experiments to show that our method yields promising results for different flight heights.