 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePROC2PDDL: Open-Domain Planning Representations from Texts
Paper and Code
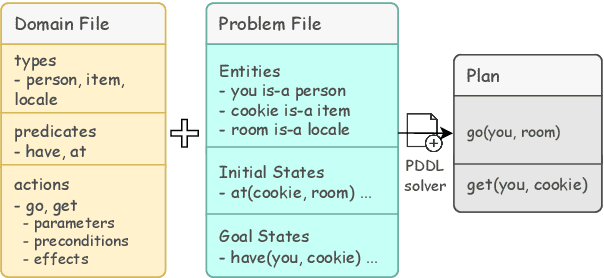
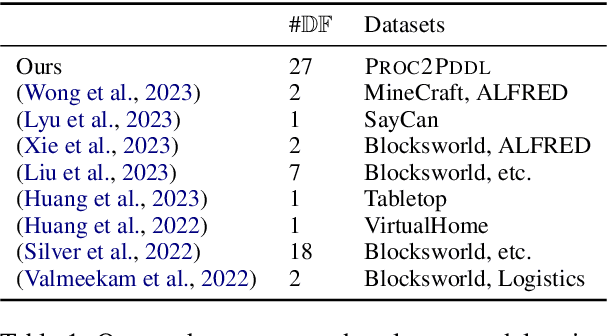

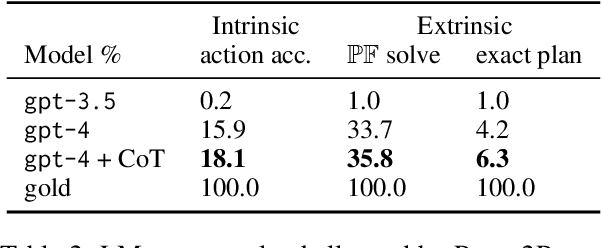
Planning in a text-based environment continues to be a major challenge for AI systems. Recent approaches have used language models to predict a planning domain definition (e.g., PDDL) but have only been evaluated in closed-domain simulated environments. To address this, we present Proc2PDDL , the first dataset containing open-domain procedural texts paired with expert-annotated PDDL representations. Using this dataset, we evaluate state-of-the-art models on defining the preconditions and effects of actions. We show that Proc2PDDL is highly challenging, with GPT-3.5's success rate close to 0% and GPT-4's around 35%. Our analysis shows both syntactic and semantic errors, indicating LMs' deficiency in both generating domain-specific prgorams and reasoning about events. We hope this analysis and dataset helps future progress towards integrating the best of LMs and formal planning.