 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Uncertainty Quantification of Prediction Models with Application to Visual Localization
Paper and Code
May 31, 2023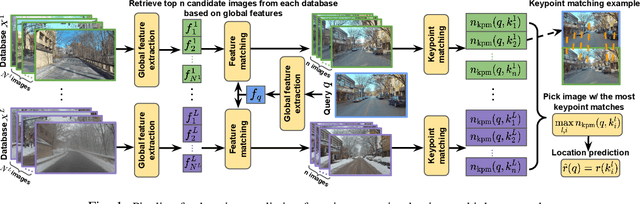



The uncertainty quantification of prediction models (e.g., neural networks) is crucial for their adoption in many robotics applications. This is arguably as important as making accurate predictions, especially for safety-critical applications such as self-driving cars. This paper proposes our approach to uncertainty quantification in the context of visual localization for autonomous driving, where we predict locations from images. Our proposed framework estimates probabilistic uncertainty by creating a sensor error model that maps an internal output of the prediction model to the uncertainty. The sensor error model is created using multiple image databases of visual localization, each with ground-truth location. We demonstrate the accuracy of our uncertainty prediction framework using the Ithaca365 dataset, which includes variations in lighting, weather (sunny, snowy, night), and alignment errors between databases. We analyze both the predicted uncertainty and its incorporation into a Kalman-based localization filter. Our results show that prediction error variations increase with poor weather and lighting condition, leading to greater uncertainty and outliers, which can be predicted by our proposed uncertainty model. Additionally, our probabilistic error model enables the filter to remove ad hoc sensor gating, as the uncertainty automatically adjusts the model to the input data