 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Traversability Model for Risk-Aware Motion Planning in Off-Road Environments
Paper and Code
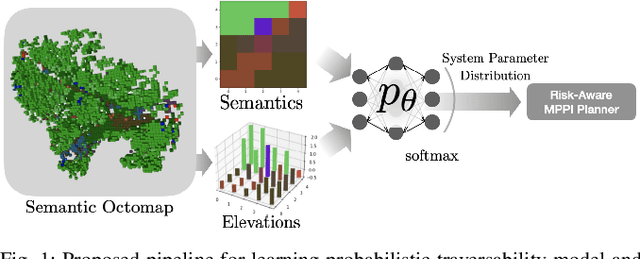
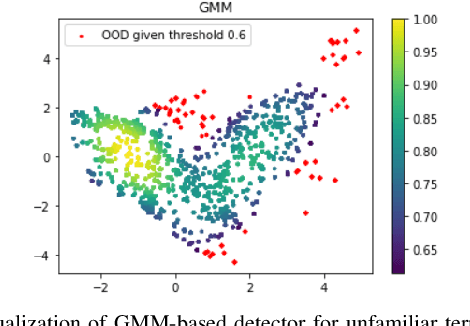
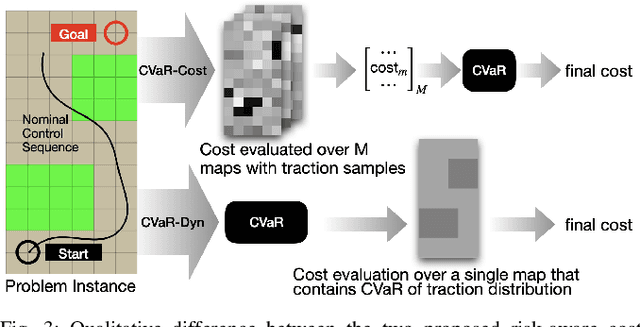
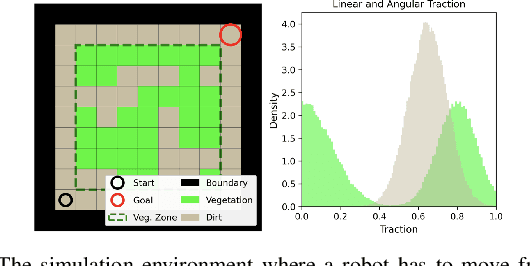
A key challenge in off-road navigation is that even visually similar or semantically identical terrain may have substantially different traction properties. Existing work typically assumes a nominal or expected robot dynamical model for planning, which can lead to degraded performance if the assumed models are not realizable given the terrain properties. In contrast, this work introduces a new probabilistic representation of traversability as a distribution of parameters in the robot's dynamical model that are conditioned on the terrain characteristics. This model is learned in a self-supervised manner by fitting a probability distribution over the parameters identified online, encoded as a neural network that takes terrain features as input. This work then presents two risk-aware planning algorithms that leverage the learned traversability model to plan risk-aware trajectories. Finally, a method for detecting unfamiliar terrain with respect to the training data is introduced based on a Gaussian Mixture Model fit to the latent space of the trained model. Experiments demonstrate that the proposed approach outperforms existing work that assumes nominal or expected robot dynamics in both success rate and completion time for representative navigation tasks. Furthermore, when the proposed approach is deployed in an unseen environment, excluding unfamiliar terrains during planning leads to improved success rate.