 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Depth Image Registration incorporating Nonvisual Information
Paper and Code
May 01, 2015
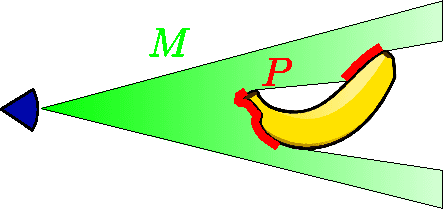

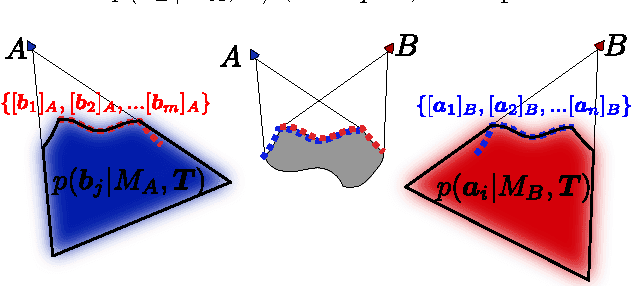
In this paper, we derive a probabilistic registration algorithm for object modeling and tracking. In many robotics applications, such as manipulation tasks, nonvisual information about the movement of the object is available, which we will combine with the visual information. Furthermore we do not only consider observations of the object, but we also take space into account which has been observed to not be part of the object. Furthermore we are computing a posterior distribution over the relative alignment and not a point estimate as typically done in for example Iterative Closest Point (ICP). To our knowledge no existing algorithm meets these three conditions and we thus derive a novel registration algorithm in a Bayesian framework. Experimental results suggest that the proposed methods perform favorably in comparison to PCL implementations of feature mapping and ICP, especially if nonvisual information is available.