 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrediction of Pedestrian Spatiotemporal Risk Levels for Intelligent Vehicles: A Data-driven Approach
Paper and Code
Nov 06, 2021
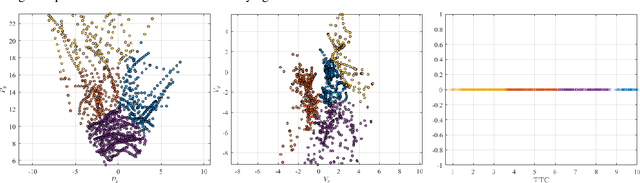


In recent years, road safety has attracted significant attention from researchers and practitioners in the intelligent transport systems domain. As one of the most common and vulnerable groups of road users, pedestrians cause great concerns due to their unpredictable behavior and movement, as subtle misunderstandings in vehicle-pedestrian interaction can easily lead to risky situations or collisions. Existing methods use either predefined collision-based models or human-labeling approaches to estimate the pedestrians' risks. These approaches are usually limited by their poor generalization ability and lack of consideration of interactions between the ego vehicle and a pedestrian. This work tackles the listed problems by proposing a Pedestrian Risk Level Prediction system. The system consists of three modules. Firstly, vehicle-perspective pedestrian data are collected. Since the data contains information regarding the movement of both the ego vehicle and pedestrian, it can simplify the prediction of spatiotemporal features in an interaction-aware fashion. Using the long short-term memory model, the pedestrian trajectory prediction module predicts their spatiotemporal features in the subsequent five frames. As the predicted trajectory follows certain interaction and risk patterns, a hybrid clustering and classification method is adopted to explore the risk patterns in the spatiotemporal features and train a risk level classifier using the learned patterns. Upon predicting the spatiotemporal features of pedestrians and identifying the corresponding risk level, the risk patterns between the ego vehicle and pedestrians are determined. Experimental results verified the capability of the PRLP system to predict the risk level of pedestrians, thus supporting the collision risk assessment of intelligent vehicles and providing safety warnings to both vehicles and pedestrians.