 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePopulation-coding and Dynamic-neurons improved Spiking Actor Network for Reinforcement Learning
Paper and Code
Jun 23, 2021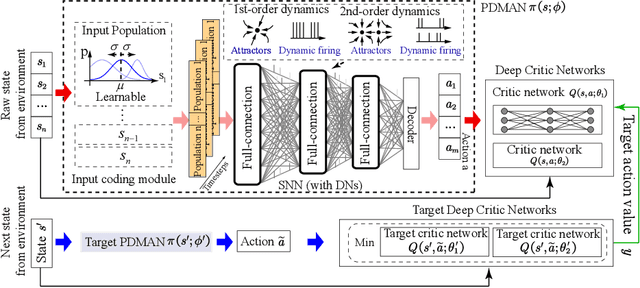
With the Deep Neural Networks (DNNs) as a powerful function approximator, Deep Reinforcement Learning (DRL) has been excellently demonstrated on robotic control tasks. Compared to DNNs with vanilla artificial neurons, the biologically plausible Spiking Neural Network (SNN) contains a diverse population of spiking neurons, making it naturally powerful on state representation with spatial and temporal information. Based on a hybrid learning framework, where a spike actor-network infers actions from states and a deep critic network evaluates the actor, we propose a Population-coding and Dynamic-neurons improved Spiking Actor Network (PDSAN) for efficient state representation from two different scales: input coding and neuronal coding. For input coding, we apply population coding with dynamically receptive fields to directly encode each input state component. For neuronal coding, we propose different types of dynamic-neurons (containing 1st-order and 2nd-order neuronal dynamics) to describe much more complex neuronal dynamics. Finally, the PDSAN is trained in conjunction with deep critic networks using the Twin Delayed Deep Deterministic policy gradient algorithm (TD3-PDSAN). Extensive experimental results show that our TD3-PDSAN model achieves better performance than state-of-the-art models on four OpenAI gym benchmark tasks. It is an important attempt to improve RL with SNN towards the effective computation satisfying biological plausibility.