 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarBEVDet: Exploring Polar Representation for Multi-View 3D Object Detection in Bird's-Eye-View
Paper and Code
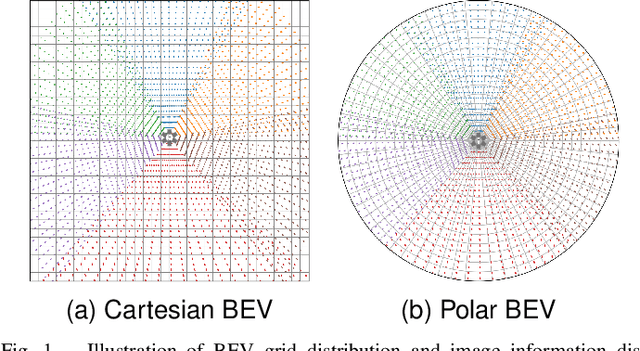
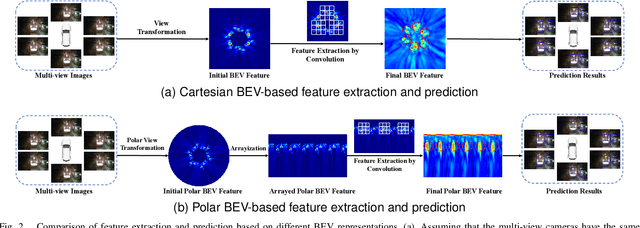
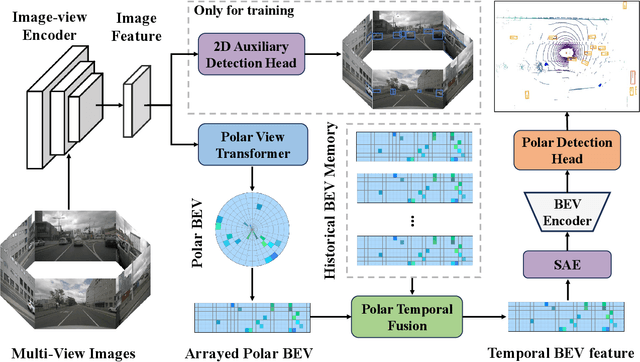
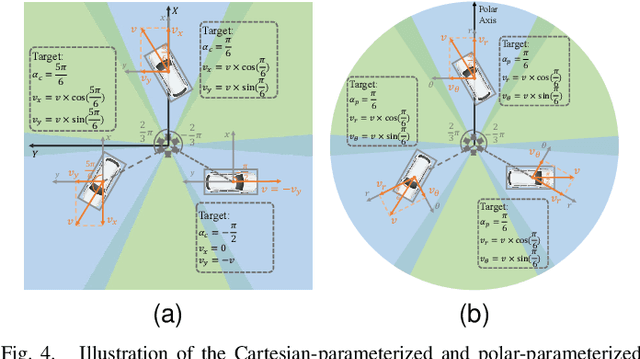
Recently, LSS-based multi-view 3D object detection provides an economical and deployment-friendly solution for autonomous driving. However, all the existing LSS-based methods transform multi-view image features into a Cartesian Bird's-Eye-View(BEV) representation, which does not take into account the non-uniform image information distribution and hardly exploits the view symmetry. In this paper, in order to adapt the image information distribution and preserve the view symmetry by regular convolution, we propose to employ the polar BEV representation to substitute the Cartesian BEV representation. To achieve this, we elaborately tailor three modules: a polar view transformer to generate the polar BEV representation, a polar temporal fusion module for fusing historical polar BEV features and a polar detection head to predict the polar-parameterized representation of the object. In addition, we design a 2D auxiliary detection head and a spatial attention enhancement module to improve the quality of feature extraction in perspective view and BEV, respectively. Finally, we integrate the above improvements into a novel multi-view 3D object detector, PolarBEVDet. Experiments on nuScenes show that PolarBEVDet achieves the superior performance. The code is available at https://github.com/Yzichen/PolarBEVDet.git.