 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePOL-LWIR Vehicle Detection: Convolutional Neural Networks Meet Polarised Infrared Sensors
Paper and Code
Apr 07, 2018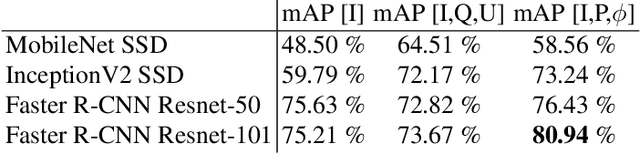
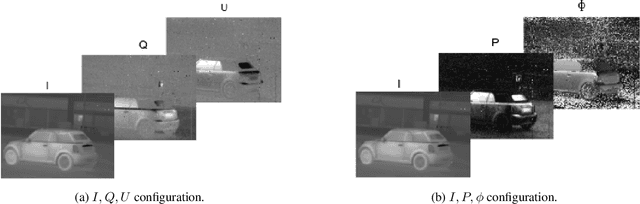
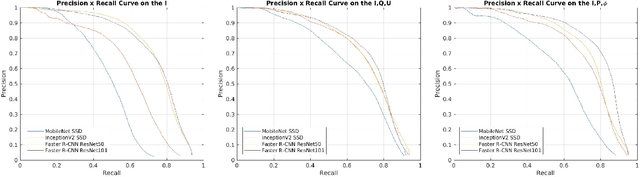
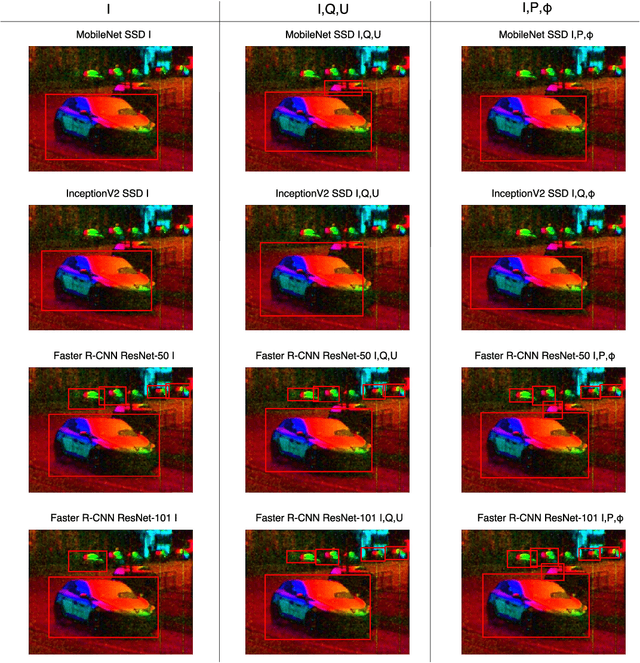
For vehicle autonomy, driver assistance and situational awareness, it is necessary to operate at day and night, and in all weather conditions. In particular, long wave infrared (LWIR) sensors that receive predominantly emitted radiation have the capability to operate at night as well as during the day. In this work, we employ a polarised LWIR (POL-LWIR) camera to acquire data from a mobile vehicle, to compare and contrast four different convolutional neural network (CNN) configurations to detect other vehicles in video sequences. We evaluate two distinct and promising approaches, two-stage detection (Faster-RCNN) and one-stage detection (SSD), in four different configurations. We also employ two different image decompositions: the first based on the polarisation ellipse and the second on the Stokes parameters themselves. To evaluate our approach, the experimental trials were quantified by mean average precision (mAP) and processing time, showing a clear trade-off between the two factors. For example, the best mAP result of 80.94% was achieved using Faster-RCNN, but at a frame rate of 6.4 fps. In contrast, MobileNet SSD achieved only 64.51% mAP, but at 53.4 fps.