 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointNetGPD: Detecting Grasp Configurations from Point Sets
Paper and Code
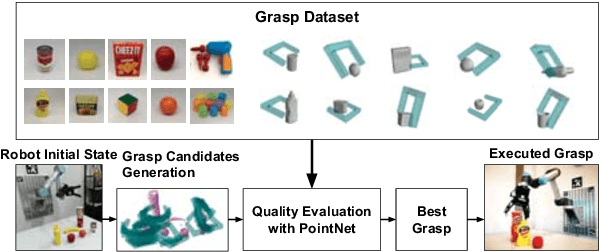
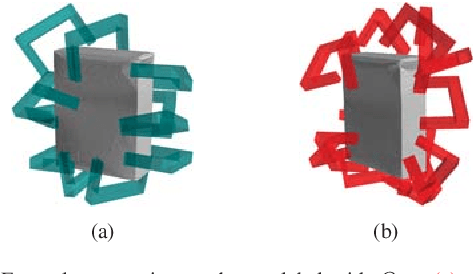
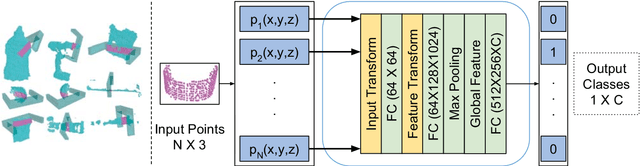
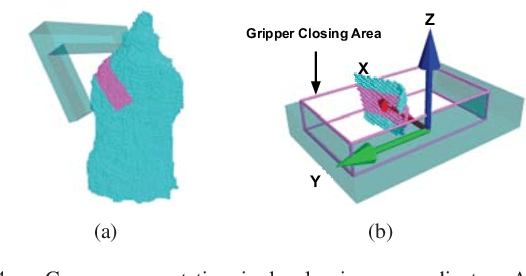
In this paper, we propose an end-to-end grasp evaluation model to address the challenging problem of localizing robot grasp configurations directly from the point cloud. Compared to recent grasp evaluation metrics that are based on handcrafted depth features and a convolutional neural network (CNN), our proposed PointNetGPD is lightweight and can directly process the 3D point cloud that locates within the gripper for grasp evaluation. Taking the raw point cloud as input, our proposed grasp evaluation network can capture the complex geometric structure of the contact area between the gripper and the object even if the point cloud is very sparse. To further improve our proposed model, we generate a larger-scale grasp dataset with 350k real point cloud and grasps with the YCB object set for training. The performance of the proposed model is quantitatively measured both in simulation and on robotic hardware. Experiments on object grasping and clutter removal show that our proposed model generalizes well to novel objects and outperforms state-of-the-art methods. Code and video are available at \href{https://lianghongzhuo.github.io/PointNetGPD}{https://lianghongzhuo.github.io/PointNetGPD}