 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointGPT: Auto-regressively Generative Pre-training from Point Clouds
Paper and Code
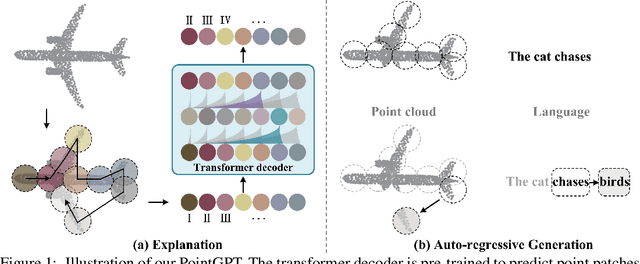
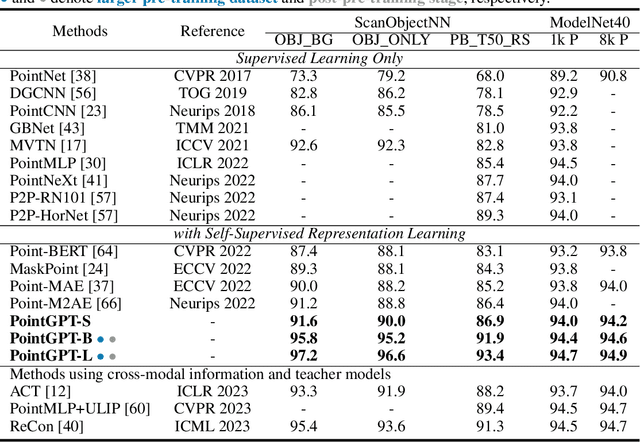
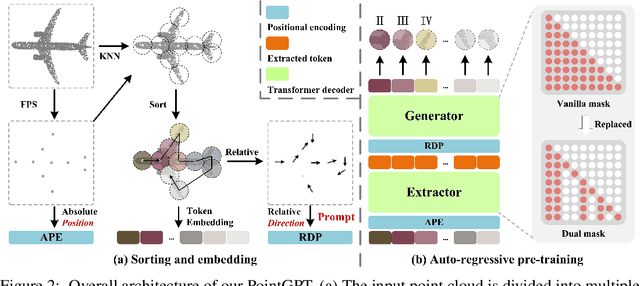
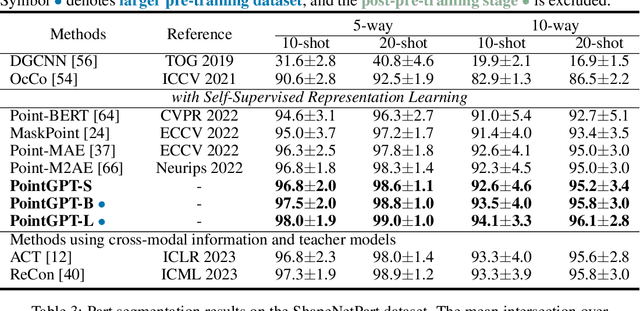
Large language models (LLMs) based on the generative pre-training transformer (GPT) have demonstrated remarkable effectiveness across a diverse range of downstream tasks. Inspired by the advancements of the GPT, we present PointGPT, a novel approach that extends the concept of GPT to point clouds, addressing the challenges associated with disorder properties, low information density, and task gaps. Specifically, a point cloud auto-regressive generation task is proposed to pre-train transformer models. Our method partitions the input point cloud into multiple point patches and arranges them in an ordered sequence based on their spatial proximity. Then, an extractor-generator based transformer decoder, with a dual masking strategy, learns latent representations conditioned on the preceding point patches, aiming to predict the next one in an auto-regressive manner. Our scalable approach allows for learning high-capacity models that generalize well, achieving state-of-the-art performance on various downstream tasks. In particular, our approach achieves classification accuracies of 94.9% on the ModelNet40 dataset and 93.4% on the ScanObjectNN dataset, outperforming all other transformer models. Furthermore, our method also attains new state-of-the-art accuracies on all four few-shot learning benchmarks.