 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning with Verbal Communication for Human-Robot Collaboration
Paper and Code
Jun 14, 2017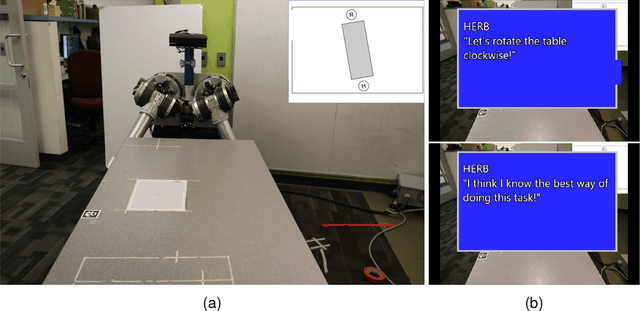
Human collaborators coordinate effectively their actions through both verbal and non-verbal communication. We believe that the the same should hold for human-robot teams. We propose a formalism that enables a robot to decide optimally between doing a task and issuing an utterance. We focus on two types of utterances: verbal commands, where the robot expresses how it wants its human teammate to behave, and state-conveying actions, where the robot explains why it is behaving this way. Human subject experiments show that enabling the robot to issue verbal commands is the most effective form of communicating objectives, while retaining user trust in the robot. Communicating why information should be done judiciously, since many participants questioned the truthfulness of the robot statements.