 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePILOT: Efficient Planning by Imitation Learning and Optimisation for Safe Autonomous Driving
Paper and Code
Nov 01, 2020
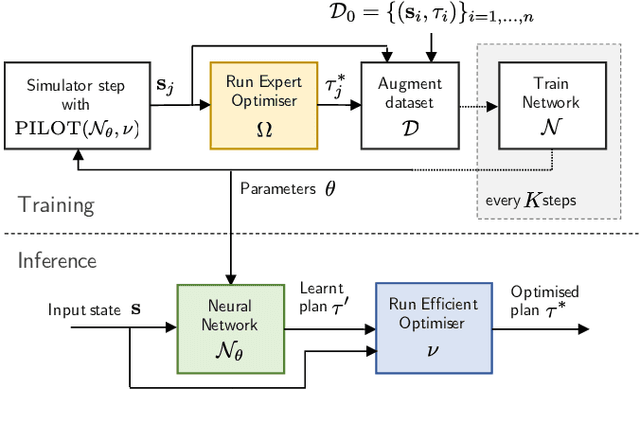
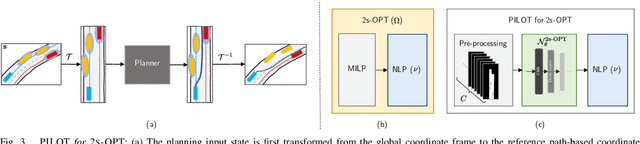

Achieving the right balance between planning quality, safety and runtime efficiency is a major challenge for autonomous driving research. Optimisation-based planners are typically capable of producing high-quality, safe plans, but at the cost of efficiency. We present PILOT, a two-stage planning framework comprising an imitation neural network and an efficient optimisation component that guarantees the satisfaction of requirements of safety and comfort. The neural network is trained to imitate an expensive-to-run optimisation-based planning system with the same objective as the efficient optimisation component of PILOT. We demonstrate in simulated autonomous driving experiments that the proposed framework achieves a significant reduction in runtime when compared to the optimisation-based expert it imitates, without sacrificing the planning quality.