 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePiFeNet: Pillar-Feature Network for Real-Time 3D Pedestrian Detection from Point Cloud
Paper and Code
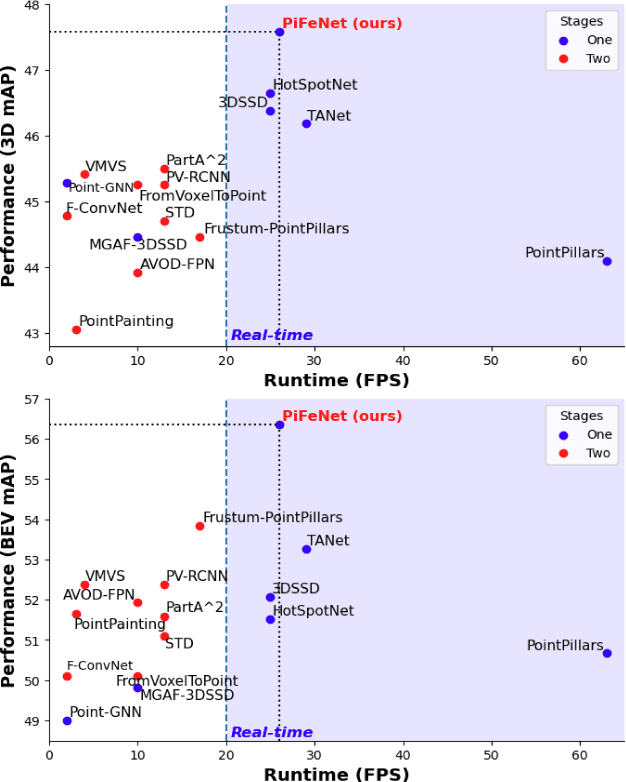
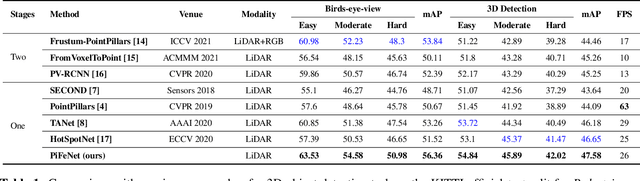
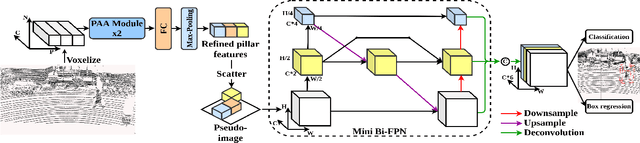

We present PiFeNet, an efficient and accurate real-time 3D detector for pedestrian detection from point clouds. We address two challenges that 3D object detection frameworks encounter when detecting pedestrians: low expressiveness of pillar features and small occupation areas of pedestrians in point clouds. Firstly, we introduce a stackable Pillar Aware Attention (PAA) module for enhanced pillar features extraction while suppressing noises in the point clouds. By integrating multi-point-aware-pooling, point-wise, channel-wise, and task-aware attention into a simple module, the representation capabilities are boosted while requiring little additional computing resources. We also present Mini-BiFPN, a small yet effective feature network that creates bidirectional information flow and multi-level cross-scale feature fusion to better integrate multi-resolution features. Our approach is ranked 1st in KITTI pedestrian BEV and 3D leaderboards while running at 26 frames per second (FPS), and achieves state-of-the-art performance on Nuscenes detection benchmark.