 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePICCOLO: Point Cloud-Centric Omnidirectional Localization
Paper and Code
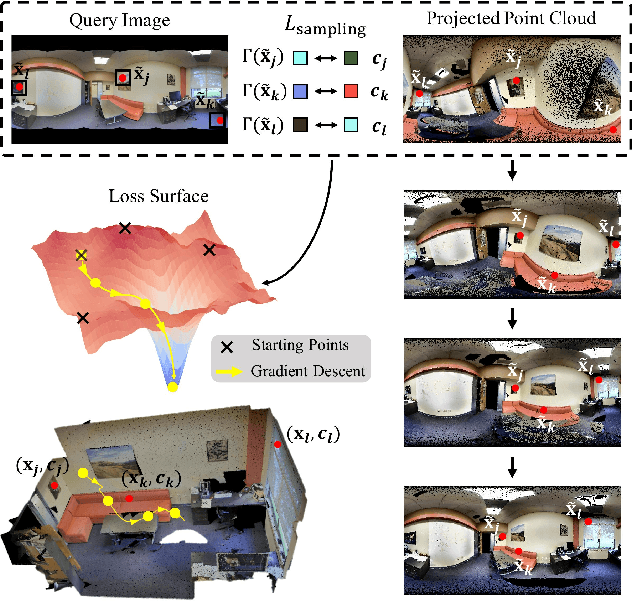
We present PICCOLO, a simple and efficient algorithm for omnidirectional localization. Given a colored point cloud and a 360 panorama image of a scene, our objective is to recover the camera pose at which the panorama image is taken. Our pipeline works in an off-the-shelf manner with a single image given as a query and does not require any training of neural networks or collecting ground-truth poses of images. Instead, we match each point cloud color to the holistic view of the panorama image with gradient-descent optimization to find the camera pose. Our loss function, called sampling loss, is point cloud-centric, evaluated at the projected location of every point in the point cloud. In contrast, conventional photometric loss is image-centric, comparing colors at each pixel location. With a simple change in the compared entities, sampling loss effectively overcomes the severe visual distortion of omnidirectional images, and enjoys the global context of the 360 view to handle challenging scenarios for visual localization. PICCOLO outperforms existing omnidirectional localization algorithms in both accuracy and stability when evaluated in various environments.