 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhantomLiDAR: Cross-modality Signal Injection Attacks against LiDAR
Paper and Code
Sep 26, 2024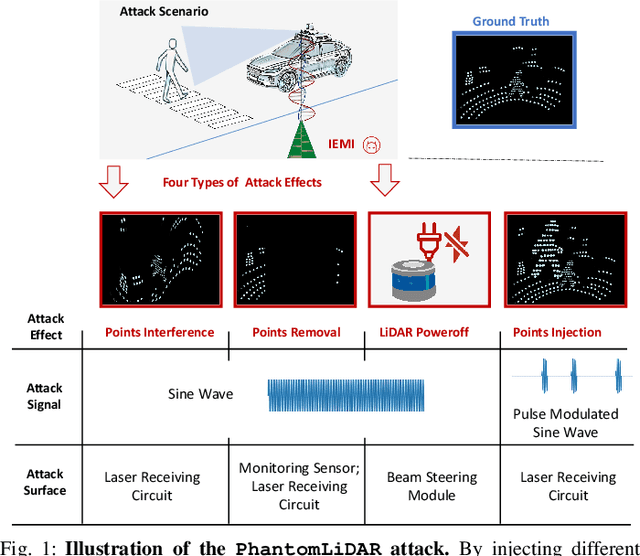
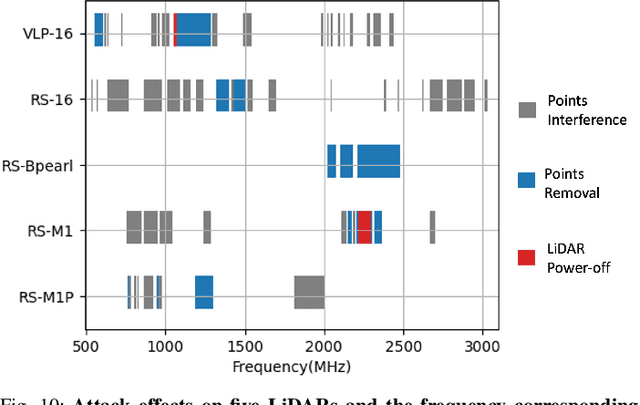
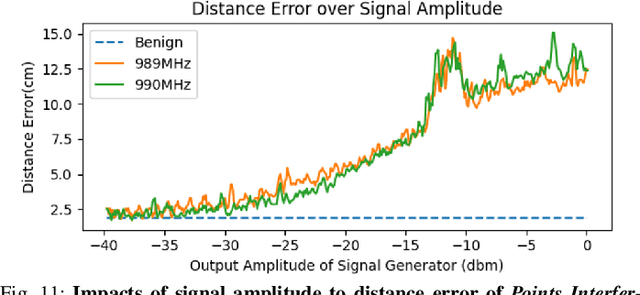
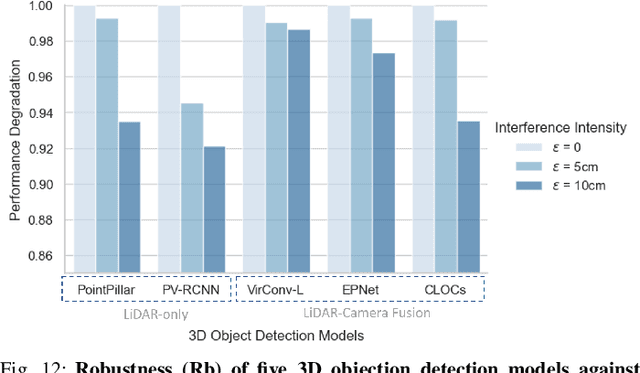
LiDAR (Light Detection and Ranging) is a pivotal sensor for autonomous driving, offering precise 3D spatial information. Previous signal attacks against LiDAR systems mainly exploit laser signals. In this paper, we investigate the possibility of cross-modality signal injection attacks, i.e., injecting intentional electromagnetic interference (IEMI) to manipulate LiDAR output. Our insight is that the internal modules of a LiDAR, i.e., the laser receiving circuit, the monitoring sensors, and the beam-steering modules, even with strict electromagnetic compatibility (EMC) testing, can still couple with the IEMI attack signals and result in the malfunction of LiDAR systems. Based on the above attack surfaces, we propose the PhantomLiDAR attack, which manipulates LiDAR output in terms of Points Interference, Points Injection, Points Removal, and even LiDAR Power-Off. We evaluate and demonstrate the effectiveness of PhantomLiDAR with both simulated and real-world experiments on five COTS LiDAR systems. We also conduct feasibility experiments in real-world moving scenarios. We provide potential defense measures that can be implemented at both the sensor level and the vehicle system level to mitigate the risks associated with IEMI attacks. Video demonstrations can be viewed at https://sites.google.com/view/phantomlidar.