 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Implications of Multi-Chiplet Neural Processing Units on Autonomous Driving Perception
Paper and Code
Nov 24, 2024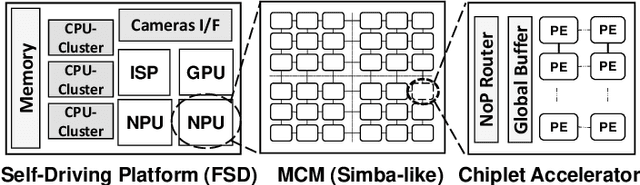
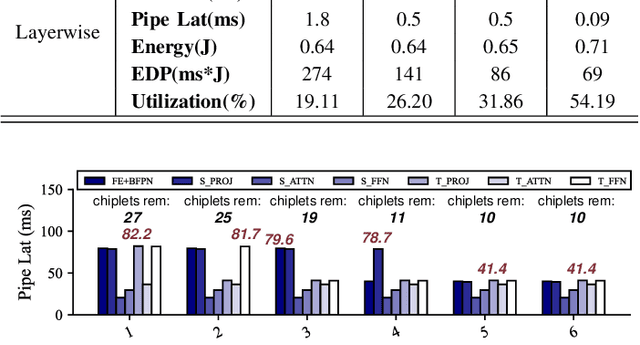
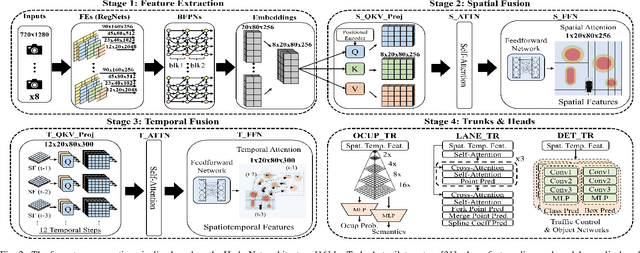
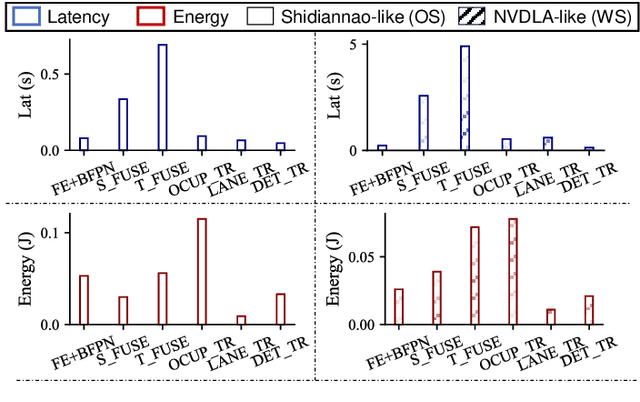
We study the application of emerging chiplet-based Neural Processing Units to accelerate vehicular AI perception workloads in constrained automotive settings. The motivation stems from how chiplets technology is becoming integral to emerging vehicular architectures, providing a cost-effective trade-off between performance, modularity, and customization; and from perception models being the most computationally demanding workloads in a autonomous driving system. Using the Tesla Autopilot perception pipeline as a case study, we first breakdown its constituent models and profile their performance on different chiplet accelerators. From the insights, we propose a novel scheduling strategy to efficiently deploy perception workloads on multi-chip AI accelerators. Our experiments using a standard DNN performance simulator, MAESTRO, show our approach realizes 82% and 2.8x increase in throughput and processing engines utilization compared to monolithic accelerator designs.