Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception Imitation: Towards Synthesis-free Simulator for Autonomous Vehicles
Paper and Code
Apr 19, 2023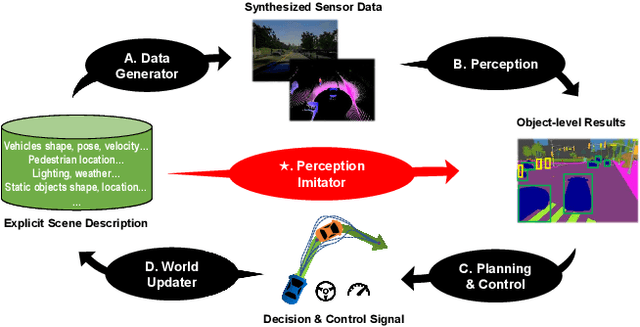
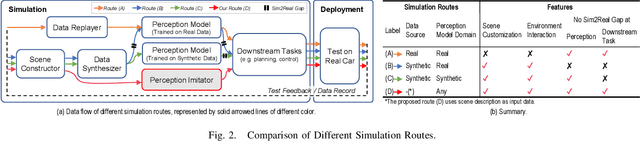
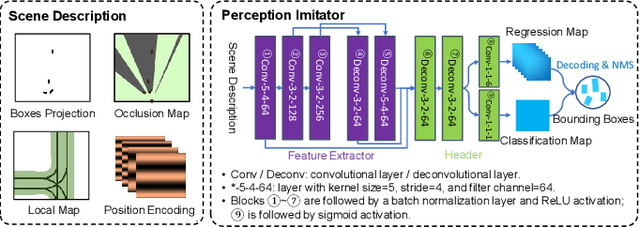
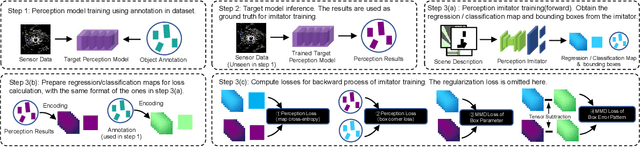
We propose a perception imitation method to simulate results of a certain perception model, and discuss a new heuristic route of autonomous driving simulator without data synthesis. The motivation is that original sensor data is not always necessary for tasks such as planning and control when semantic perception results are ready, so that simulating perception directly is more economic and efficient. In this work, a series of evaluation methods such as matching metric and performance of downstream task are exploited to examine the simulation quality. Experiments show that our method is effective to model the behavior of learning-based perception model, and can be further applied in the proposed simulation route smoothly.
View paper on