 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceive, Transform, and Act: Multi-Modal Attention Networks for Vision-and-Language Navigation
Paper and Code
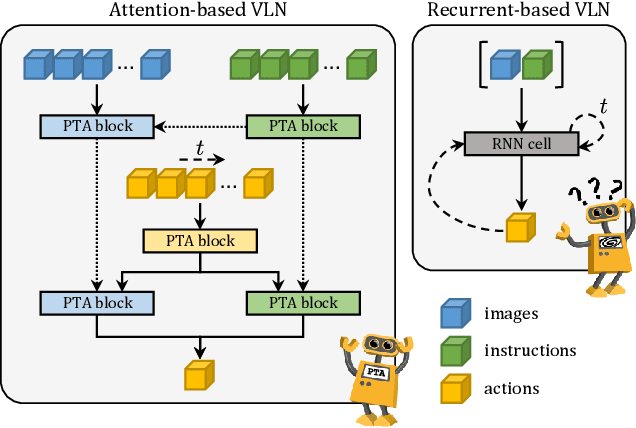
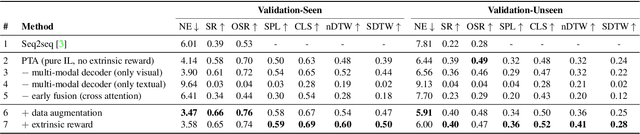
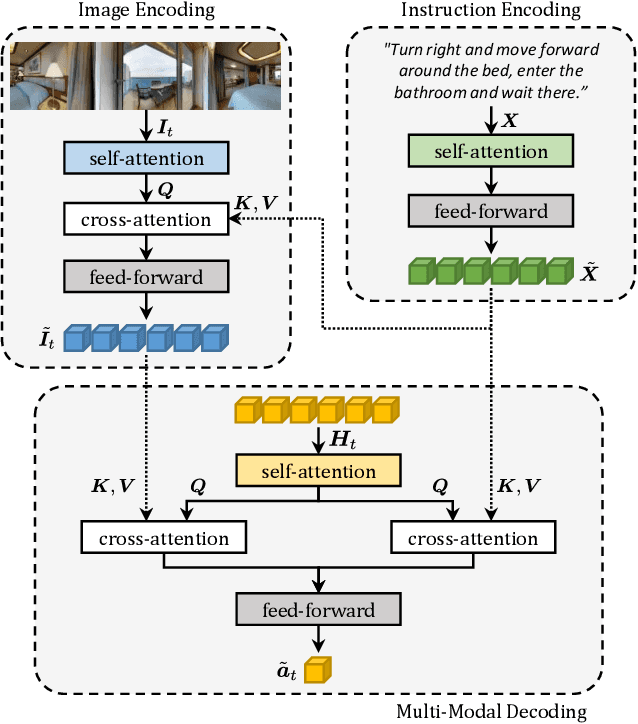
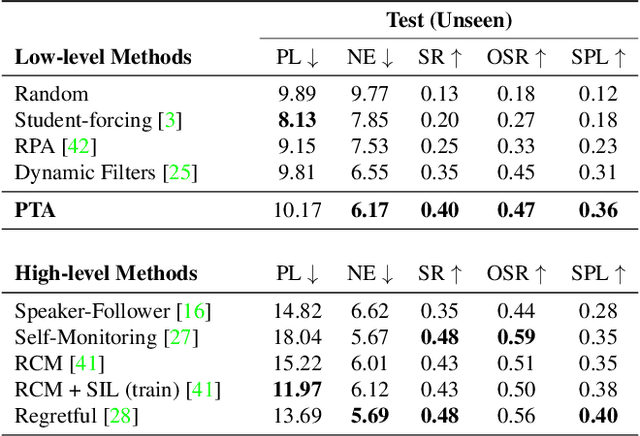
Vision-and-Language Navigation (VLN) is a challenging task in which an agent needs to follow a language-specified path to reach a target destination. In this paper, we strive for the creation of an agent able to tackle three key issues: multi-modality, long-term dependencies, and adaptability towards different locomotive settings. To that end, we devise "Perceive, Transform, and Act" (PTA): a fully-attentive VLN architecture that leaves the recurrent approach behind and the first Transformer-like architecture incorporating three different modalities - natural language, images, and discrete actions for the agent control. In particular, we adopt an early fusion strategy to merge lingual and visual information efficiently in our encoder. We then propose to refine the decoding phase with a late fusion extension between the agent's history of actions and the perception modalities. We experimentally validate our model on two datasets and two different action settings. PTA surpasses previous state-of-the-art architectures for low-level VLN on R2R and achieves the first place for both setups in the recently proposed R4R benchmark. Our code is publicly available at https://github.com/aimagelab/perceive-transform-and-act.