 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedestrian Detection: The Elephant In The Room
Paper and Code
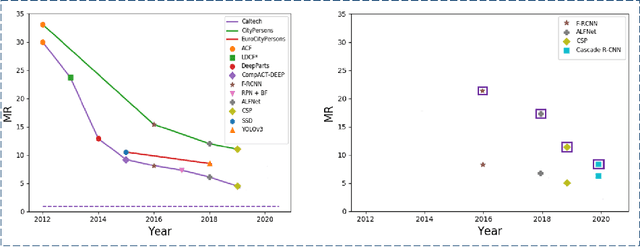

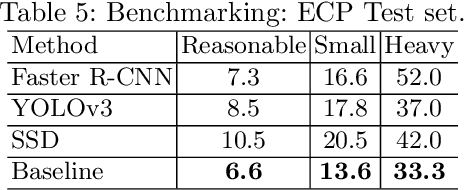
Pedestrian detection is used in many vision based applications ranging from video surveillance to autonomous driving. Despite achieving high performance, it is still largely unknown how well existing detectors generalize to unseen data. To this end, we conduct a comprehensive study in this paper, using a general principle of direct cross-dataset evaluation. Through this study, we find that existing state-of-the-art pedestrian detectors generalize poorly from one dataset to another. We demonstrate that there are two reasons for this trend. Firstly, they over-fit on popular datasets in a traditional single-dataset training and test pipeline. Secondly, the training source is generally not dense in pedestrians and diverse in scenarios. Accordingly, through experiments we find that a general purpose object detector works better in direct cross-dataset evaluation compared with state-of-the-art pedestrian detectors and we illustrate that diverse and dense datasets, collected by crawling the web, serve to be an efficient source of pre-training for pedestrian detection. Furthermore, we find that a progressive training pipeline works good for autonomous driving oriented detector. We improve upon previous state-of-the-art on reasonable/heavy subsets of CityPersons dataset by 1.3%/1.7% and on Caltech by 1.8%/14.9% in terms of log average miss rate (MR^2) points without any fine-tuning on the test set. Detector trained through proposed pipeline achieves top rank at the leaderborads of CityPersons [42] and ECP [4]. Code and models will be available at https://github.com/hasanirtiza/Pedestron.