 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Residual Bi-Fusion Feature Pyramid Network for Accurate Single-Shot Object Detection
Paper and Code
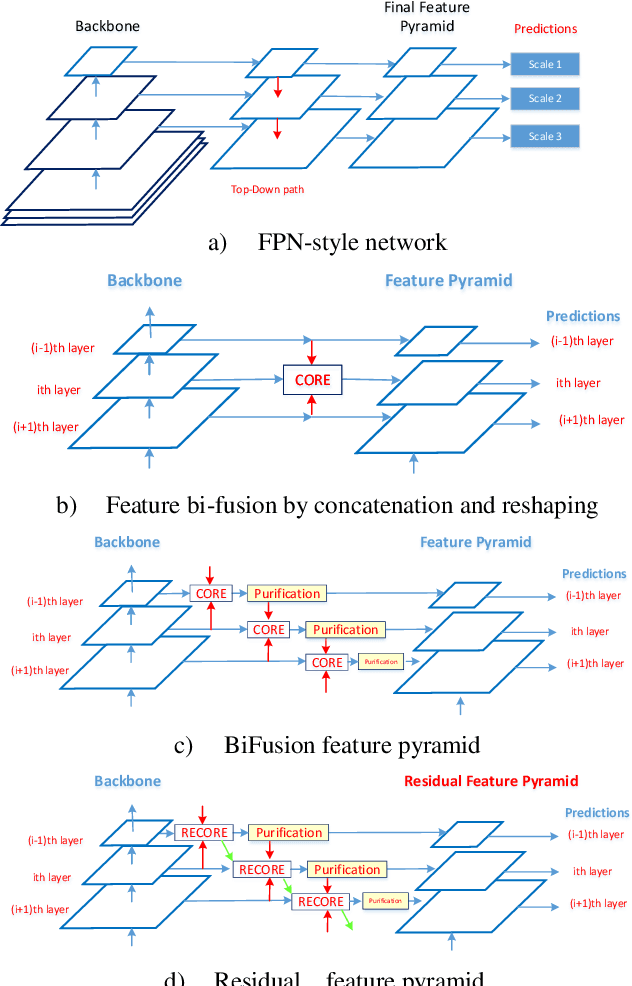

We propose the Parallel Residual Bi-Fusion Feature Pyramid Network (PRB-FPN) for fast and accurate single-shot object detection. Feature Pyramid (FP) is widely used in recent visual detection, however the top-down pathway of FP cannot preserve accurate localization due to pooling shifting. The advantage of FP is weaken as deeper backbones with more layers are used. To address this issue, we propose a new parallel FP structure with bi-directional (top-down and bottom-up) fusion and associated improvements to retain high-quality features for accurate localization. Our method is particularly suitable for detecting small objects. We provide the following design improvements: (1) A parallel bifusion FP structure with a Bottom-up Fusion Module (BFM) to detect both small and large objects at once with high accuracy. (2) A COncatenation and RE-organization (CORE) module provides a bottom-up pathway for feature fusion, which leads to the bi-directional fusion FP that can recover lost information from lower-layer feature maps. (3) The CORE feature is further purified to retain richer contextual information. Such purification is performed with CORE in a few iterations in both top-down and bottom-up pathways. (4) The adding of a residual design to CORE leads to a new Re-CORE module that enables easy training and integration with a wide range of (deeper or lighter) backbones. The proposed network achieves state-of-the-art performance on UAVDT17 and MS COCO datasets.