 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAPL-SLAM: Principal Axis-Anchored Monocular Point-Line SLAM
Paper and Code
Oct 16, 2024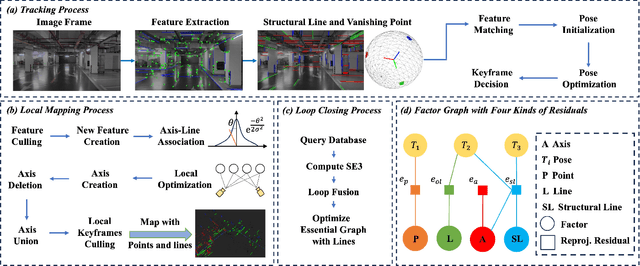



In point-line SLAM systems, the utilization of line structural information and the optimization of lines are two significant problems. The former is usually addressed through structural regularities, while the latter typically involves using minimal parameter representations of lines in optimization. However, separating these two steps leads to the loss of constraint information to each other. We anchor lines with similar directions to a principal axis and optimize them with $n+2$ parameters for $n$ lines, solving both problems together. Our method considers scene structural information, which can be easily extended to different world hypotheses while significantly reducing the number of line parameters to be optimized, enabling rapid and accurate mapping and tracking. To further enhance the system's robustness and avoid mismatch, we have modeled the line-axis probabilistic data association and provided the algorithm for axis creation, updating, and optimization. Additionally, considering that most real-world scenes conform to the Atlanta World hypothesis, we provide a structural line detection strategy based on vertical priors and vanishing points. Experimental results and ablation studies on various indoor and outdoor datasets demonstrate the effectiveness of our system.