 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOVO: Open-Vocabulary Occupancy
Paper and Code
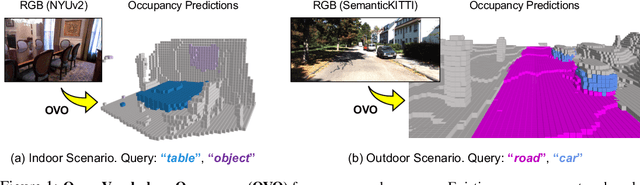

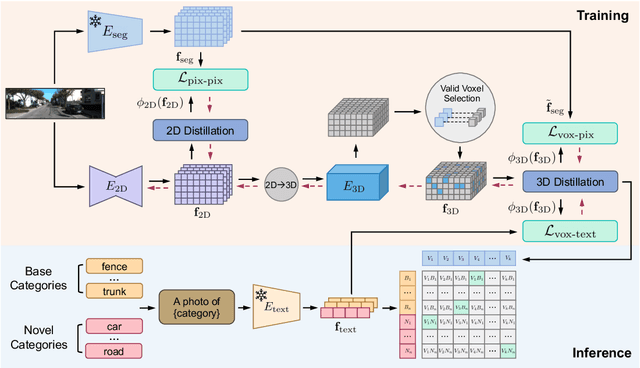

Semantic occupancy prediction aims to infer dense geometry and semantics of surroundings for an autonomous agent to operate safely in the 3D environment. Existing occupancy prediction methods are almost entirely trained on human-annotated volumetric data. Although of high quality, the generation of such 3D annotations is laborious and costly, restricting them to a few specific object categories in the training dataset. To address this limitation, this paper proposes Open Vocabulary Occupancy (OVO), a novel approach that allows semantic occupancy prediction of arbitrary classes but without the need for 3D annotations during training. Keys to our approach are (1) knowledge distillation from a pre-trained 2D open-vocabulary segmentation model to the 3D occupancy network, and (2) pixel-voxel filtering for high-quality training data generation. The resulting framework is simple, compact, and compatible with most state-of-the-art semantic occupancy prediction models. On NYUv2 and SemanticKITTI datasets, OVO achieves competitive performance compared to supervised semantic occupancy prediction approaches. Furthermore, we conduct extensive analyses and ablation studies to offer insights into the design of the proposed framework.