 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization Beyond the Convolution: Generalizing Spatial Relations with End-to-End Metric Learning
Paper and Code
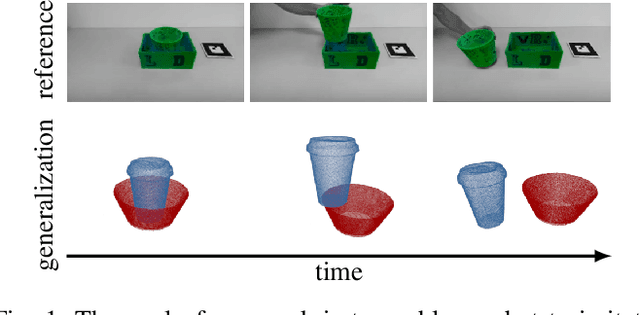
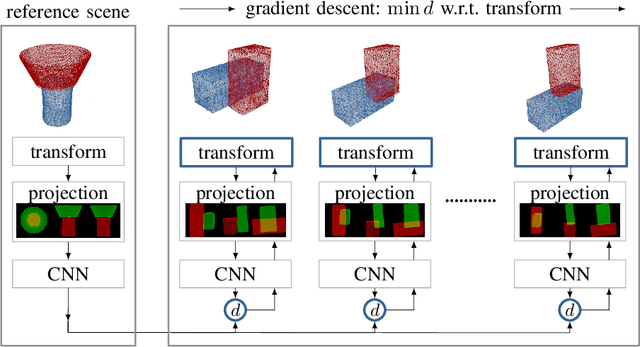
To operate intelligently in domestic environments, robots require the ability to understand arbitrary spatial relations between objects and to generalize them to objects of varying sizes and shapes. In this work, we present a novel end-to-end approach to generalize spatial relations based on distance metric learning. We train a neural network to transform 3D point clouds of objects to a metric space that captures the similarity of the depicted spatial relations, using only geometric models of the objects. Our approach employs gradient-based optimization to compute object poses in order to imitate an arbitrary target relation by reducing the distance to it under the learned metric. Our results based on simulated and real-world experiments show that the proposed method enables robots to generalize spatial relations to unknown objects over a continuous spectrum.