 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptical Lens Attack on Monocular Depth Estimation for Autonomous Driving
Paper and Code

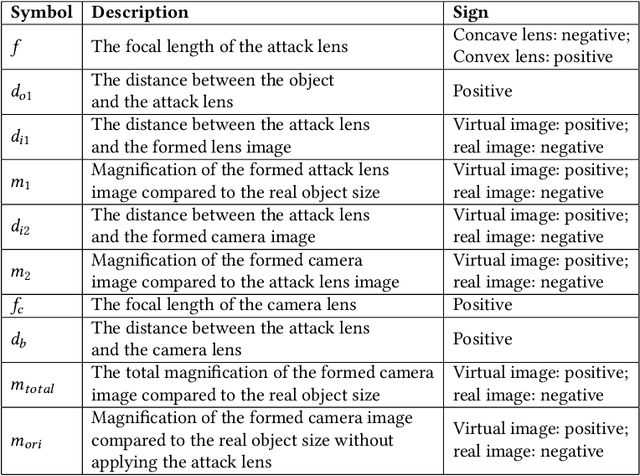
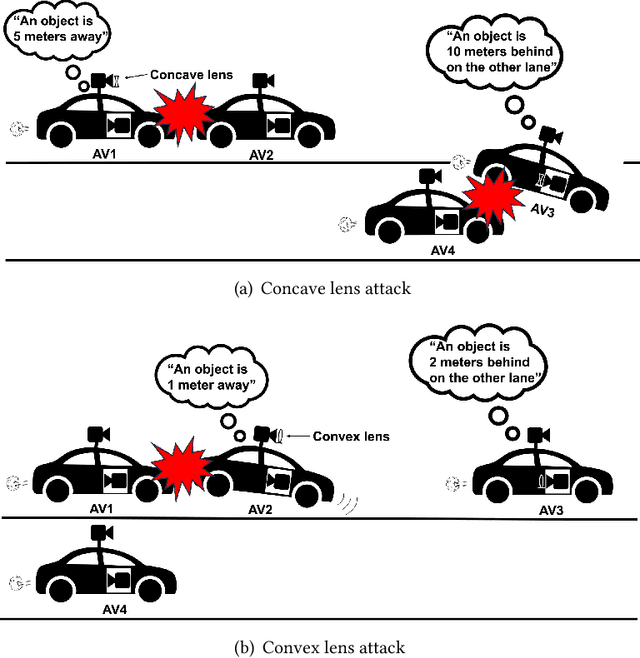
Monocular Depth Estimation (MDE) is a pivotal component of vision-based Autonomous Driving (AD) systems, enabling vehicles to estimate the depth of surrounding objects using a single camera image. This estimation guides essential driving decisions, such as braking before an obstacle or changing lanes to avoid collisions. In this paper, we explore vulnerabilities of MDE algorithms in AD systems, presenting LensAttack, a novel physical attack that strategically places optical lenses on the camera of an autonomous vehicle to manipulate the perceived object depths. LensAttack encompasses two attack formats: concave lens attack and convex lens attack, each utilizing different optical lenses to induce false depth perception. We first develop a mathematical model that outlines the parameters of the attack, followed by simulations and real-world evaluations to assess its efficacy on state-of-the-art MDE models. Additionally, we adopt an attack optimization method to further enhance the attack success rate by optimizing the attack focal length. To better evaluate the implications of LensAttack on AD, we conduct comprehensive end-to-end system simulations using the CARLA platform. The results reveal that LensAttack can significantly disrupt the depth estimation processes in AD systems, posing a serious threat to their reliability and safety. Finally, we discuss some potential defense methods to mitigate the effects of the proposed attack.