 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOperational Adaptation of DNN Classifiers using Elastic Weight Consolidation
Paper and Code
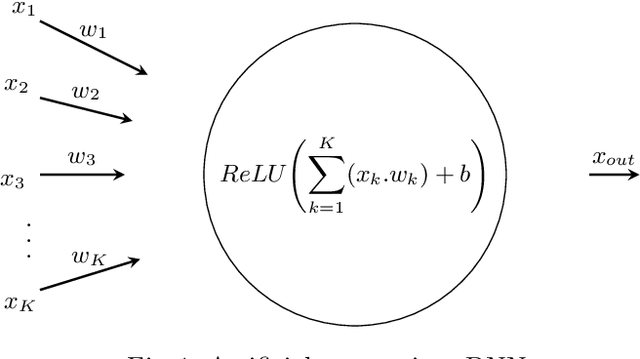
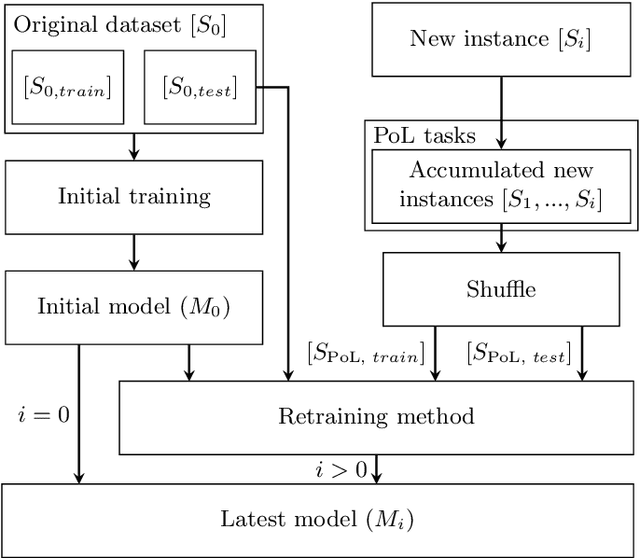
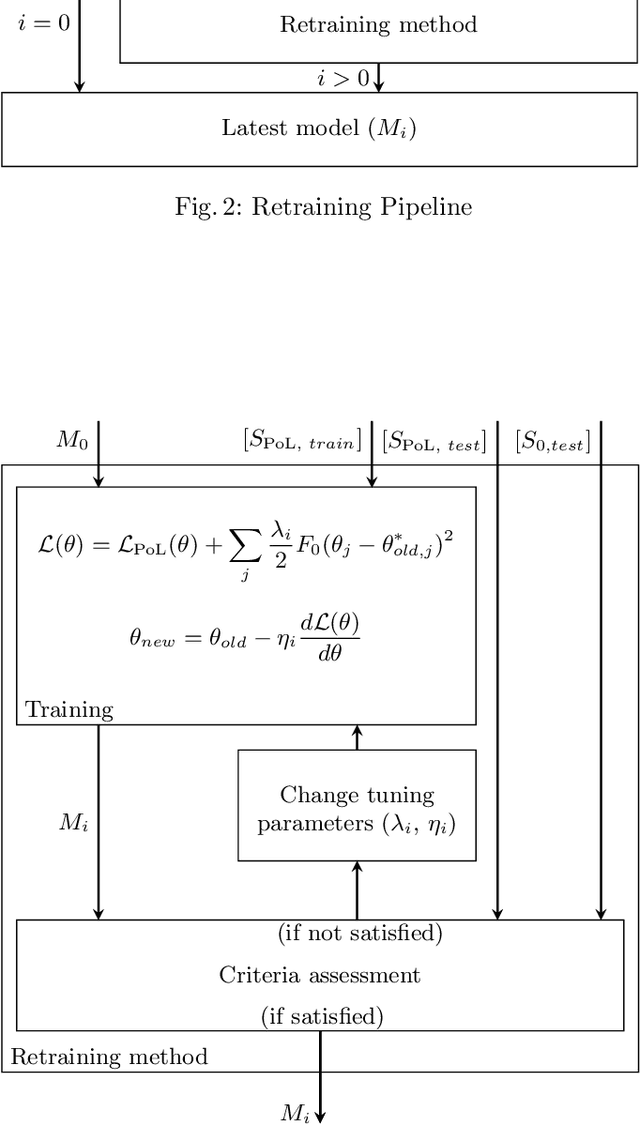
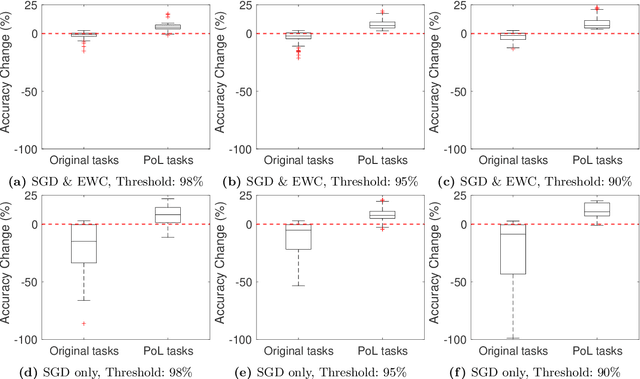
Autonomous systems (AS) often use Deep Neural Network (DNN) classifiers to allow them to operate in complex, high dimensional, non-linear, and dynamically changing environments. Due to the complexity of these environments, DNN classifiers may output misclassifications due to experiencing new tasks in their operational environments, which were not identified during development. Removing a system from operation and retraining it to include the new identified task becomes economically infeasible as the number of such autonomous systems increase. Additionally, such misclassifications may cause financial losses and safety threats to the AS or to other operators in its environment. In this paper, we propose to reduce such threats by investigating if DNN classifiers can adapt its knowledge to learn new information in the AS's operational environment, using only a limited number of observations encountered sequentially during operation. This allows the AS to adapt to new encountered information and hence increases the AS's reliability on doing correct classifications. However, retraining DNNs on different observations than used in prior training is known to cause catastrophic forgetting or significant model drift. We investigate if this problem can be controlled by using Elastic Weight Consolidation (EWC) whilst learning from limited new observations. We carry out experiments using original and noisy versions of the MNIST dataset to represent known and new information to DNN classifiers. Results show that using EWC does make the process of adaptation to new information a lot more controlled, and thus allowing for reliable adaption of ASs to new information in their operational environment.