 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Vocabulary 3D Detection via Image-level Class and Debiased Cross-modal Contrastive Learning
Paper and Code
Jul 05, 2022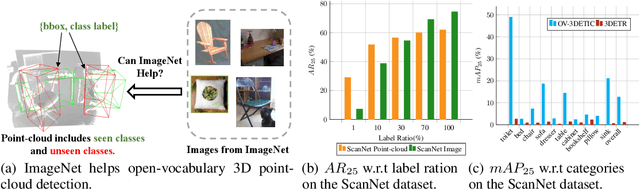
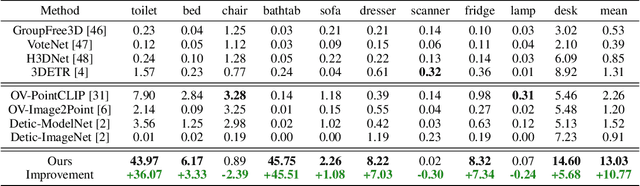
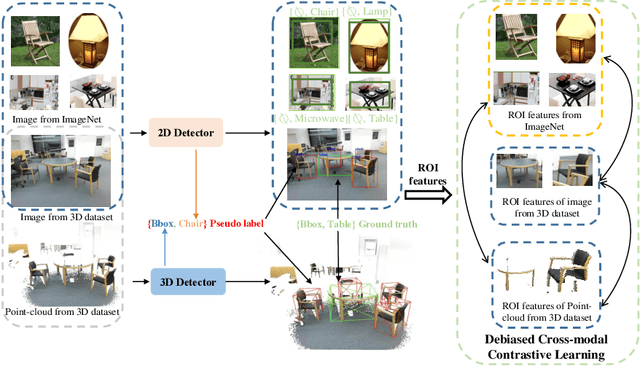
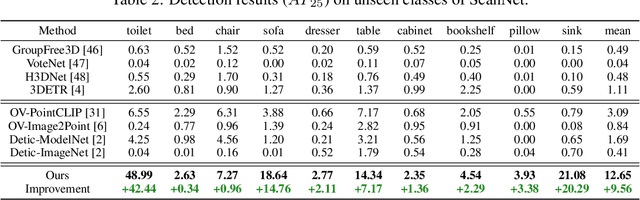
Current point-cloud detection methods have difficulty detecting the open-vocabulary objects in the real world, due to their limited generalization capability. Moreover, it is extremely laborious and expensive to collect and fully annotate a point-cloud detection dataset with numerous classes of objects, leading to the limited classes of existing point-cloud datasets and hindering the model to learn general representations to achieve open-vocabulary point-cloud detection. As far as we know, we are the first to study the problem of open-vocabulary 3D point-cloud detection. Instead of seeking a point-cloud dataset with full labels, we resort to ImageNet1K to broaden the vocabulary of the point-cloud detector. We propose OV-3DETIC, an Open-Vocabulary 3D DETector using Image-level Class supervision. Specifically, we take advantage of two modalities, the image modality for recognition and the point-cloud modality for localization, to generate pseudo labels for unseen classes. Then we propose a novel debiased cross-modal contrastive learning method to transfer the knowledge from image modality to point-cloud modality during training. Without hurting the latency during inference, OV-3DETIC makes the point-cloud detector capable of achieving open-vocabulary detection. Extensive experiments demonstrate that the proposed OV-3DETIC achieves at least 10.77 % mAP improvement (absolute value) and 9.56 % mAP improvement (absolute value) by a wide range of baselines on the SUN-RGBD dataset and ScanNet dataset, respectively. Besides, we conduct sufficient experiments to shed light on why the proposed OV-3DETIC works.