 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline V2X Scheduling for Raw-Level Cooperative Perception
Paper and Code
Feb 12, 2022

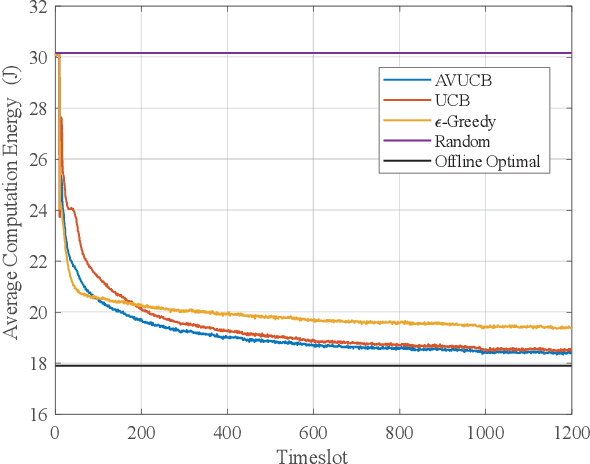
Cooperative perception of connected vehicles comes to the rescue when the field of view restricts stand-alone intelligence. While raw-level cooperative perception preserves most information to guarantee accuracy, it is demanding in communication bandwidth and computation power. Therefore, it is important to schedule the most beneficial vehicle to share its sensor in terms of supplementary view and stable network connection. In this paper, we present a model of raw-level cooperative perception and formulate the energy minimization problem of sensor sharing scheduling as a variant of the Multi-Armed Bandit (MAB) problem. Specifically, volatility of the neighboring vehicles, heterogeneity of V2X channels, and the time-varying traffic context are taken into consideration. Then we propose an online learning-based algorithm with logarithmic performance loss, achieving a decent trade-off between exploration and exploitation. Simulation results under different scenarios indicate that the proposed algorithm quickly learns to schedule the optimal cooperative vehicle and saves more energy as compared to baseline algorithms.