 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Spatial Concept and Lexical Acquisition with Simultaneous Localization and Mapping
Paper and Code
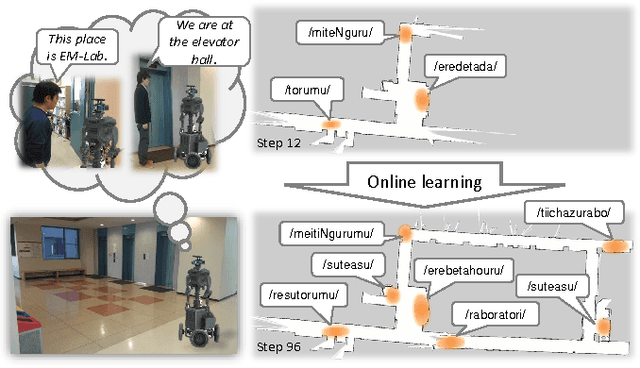
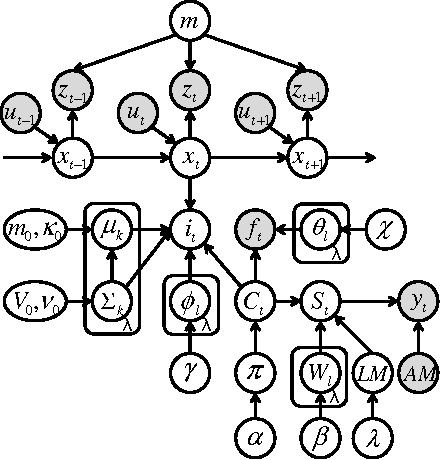
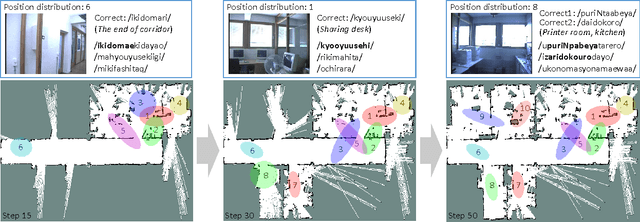
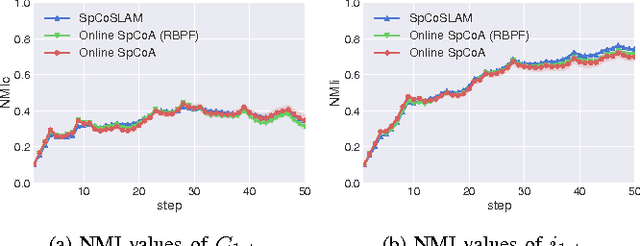
In this paper, we propose an online learning algorithm based on a Rao-Blackwellized particle filter for spatial concept acquisition and mapping. We have proposed a nonparametric Bayesian spatial concept acquisition model (SpCoA). We propose a novel method (SpCoSLAM) integrating SpCoA and FastSLAM in the theoretical framework of the Bayesian generative model. The proposed method can simultaneously learn place categories and lexicons while incrementally generating an environmental map. Furthermore, the proposed method has scene image features and a language model added to SpCoA. In the experiments, we tested online learning of spatial concepts and environmental maps in a novel environment of which the robot did not have a map. Then, we evaluated the results of online learning of spatial concepts and lexical acquisition. The experimental results demonstrated that the robot was able to more accurately learn the relationships between words and the place in the environmental map incrementally by using the proposed method.