 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Meta-Critic Learning for Off-Policy Actor-Critic Methods
Paper and Code
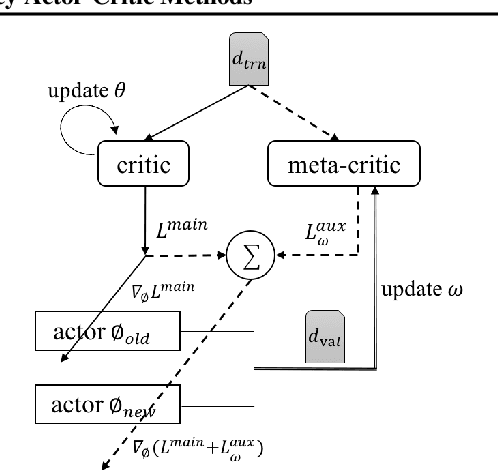
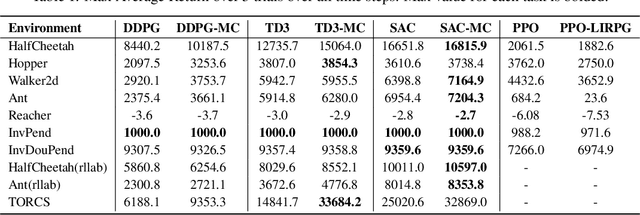
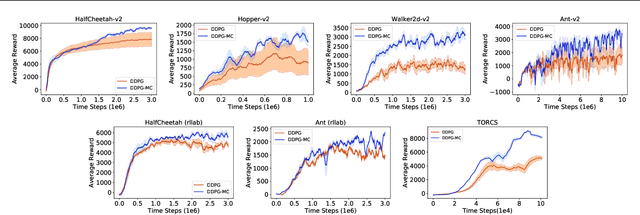

Off-Policy Actor-Critic (Off-PAC) methods have proven successful in a variety of continuous control tasks. Normally, the critic's action-value function is updated using temporal-difference, and the critic in turn provides a loss for the actor that trains it to take actions with higher expected return. In this paper, we introduce a novel and flexible meta-critic that observes the learning process and meta-learns an additional loss for the actor that accelerates and improves actor-critic learning. Compared to the vanilla critic, the meta-critic network is explicitly trained to accelerate the learning process; and compared to existing meta-learning algorithms, meta-critic is rapidly learned online for a single task, rather than slowly over a family of tasks. Crucially, our meta-critic framework is designed for off-policy based learners, which currently provide state-of-the-art reinforcement learning sample efficiency. We demonstrate that online meta-critic learning leads to improvements in avariety of continuous control environments when combined with contemporary Off-PAC methods DDPG, TD3 and the state-of-the-art SAC.