 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-Shot Domain-Adaptive Imitation Learning via Progressive Learning
Paper and Code
Apr 24, 2022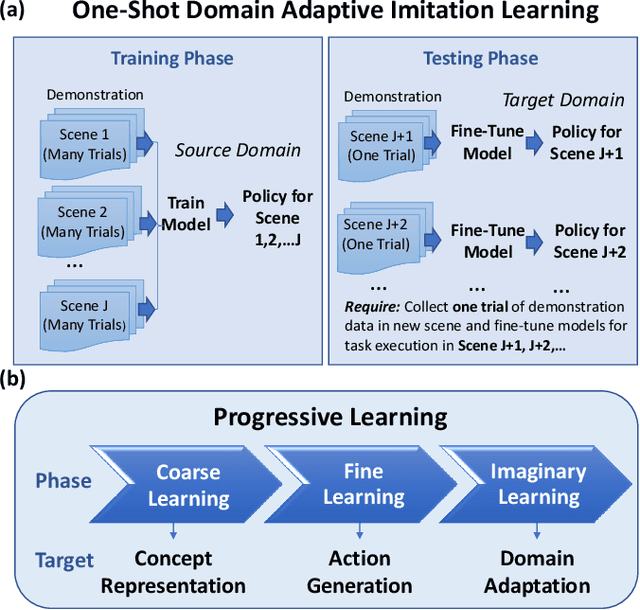
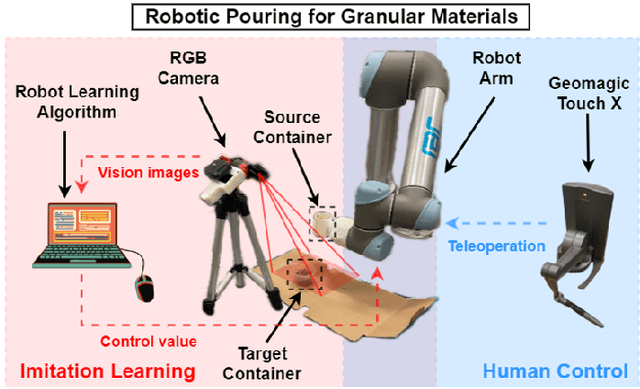

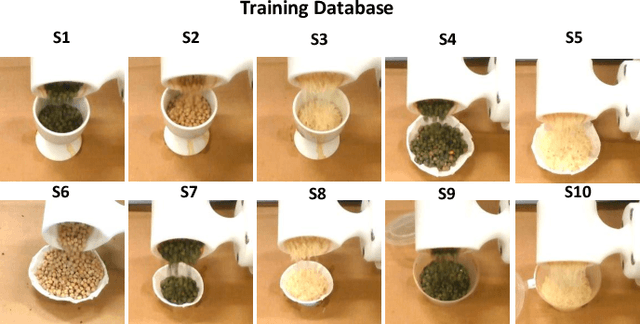
Traditional deep learning-based visual imitation learning techniques require a large amount of demonstration data for model training, and the pre-trained models are difficult to adapt to new scenarios. To address these limitations, we propose a unified framework using a novel progressive learning approach comprised of three phases: i) a coarse learning phase for concept representation, ii) a fine learning phase for action generation, and iii) an imaginary learning phase for domain adaptation. Overall, this approach leads to a one-shot domain-adaptive imitation learning framework. We use robotic pouring task as an example to evaluate its effectiveness. Our results show that the method has several advantages over contemporary end-to-end imitation learning approaches, including an improved success rate for task execution and more efficient training for deep imitation learning. In addition, the generalizability to new domains is improved, as demonstrated here with novel background, target container and granule combinations. We believe that the proposed method can be broadly applicable to different industrial or domestic applications that involve deep imitation learning for robotic manipulation, where the target scenarios have high diversity while the human demonstration data is limited.