Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Problem of Reformulating Systems with Uncertain Dynamics as a Stochastic Differential Equation
Paper and Code
Nov 11, 2021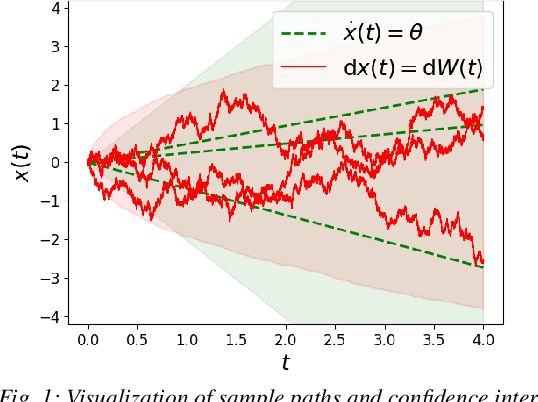
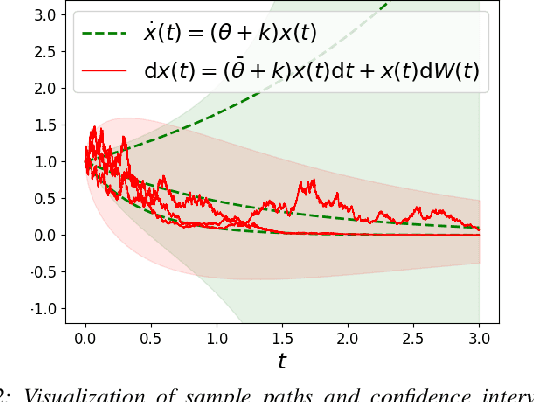
We identify an issue in recent approaches to learning-based control that reformulate systems with uncertain dynamics using a stochastic differential equation. Specifically, we discuss the approximation that replaces a model with fixed but uncertain parameters (a source of epistemic uncertainty) with a model subject to external disturbances modeled as a Brownian motion (corresponding to aleatoric uncertainty).
View paper on