 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Origins of Self-Modeling
Paper and Code
Sep 05, 2022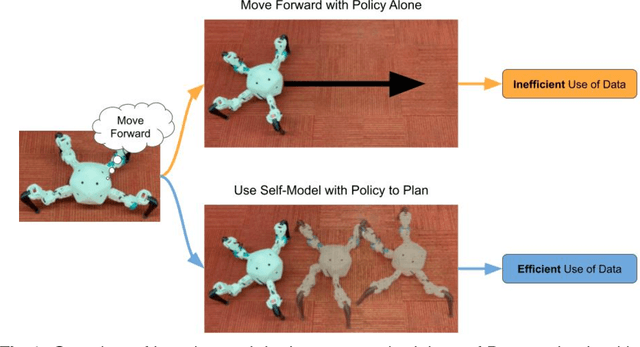
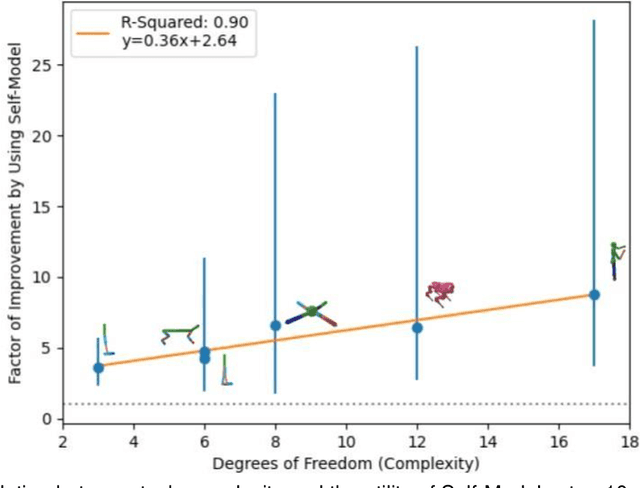

Self-Modeling is the process by which an agent, such as an animal or machine, learns to create a predictive model of its own dynamics. Once captured, this self-model can then allow the agent to plan and evaluate various potential behaviors internally using the self-model, rather than using costly physical experimentation. Here, we quantify the benefits of such self-modeling against the complexity of the robot. We find a R2 =0.90 correlation between the number of degrees of freedom a robot has, and the added value of self-modeling as compared to a direct learning baseline. This result may help motivate self modeling in increasingly complex robotic systems, as well as shed light on the origins of self-modeling, and ultimately self-awareness, in animals and humans.