 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-board Communication-based Relative Localization for Collision Avoidance in Micro Air Vehicle teams
Paper and Code
Mar 08, 2017
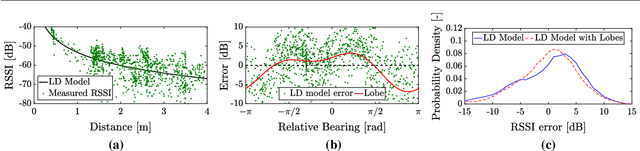
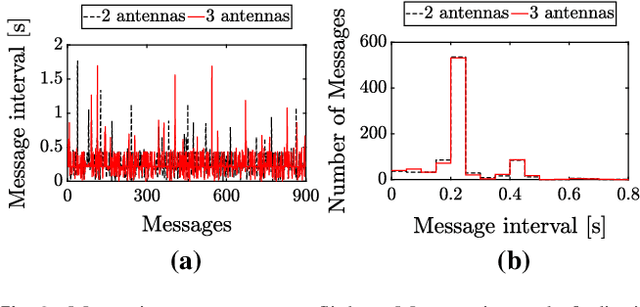
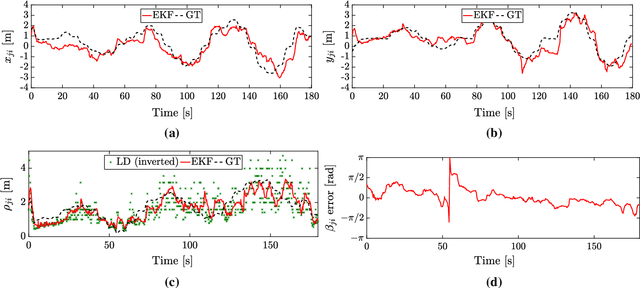
Micro Air Vehicles (MAVs) will unlock their true potential once they can operate in groups. To this end, it is essential for them to estimate on-board the relative location of their neighbors. The challenge lies in limiting the mass and processing burden needed to enable this. We developed a relative localization method that only requires the MAVs to communicate via their wireless transceiver. Communication allows the exchange of on-board states (velocity, height, and orientation), while the signal-strength provides range data. These quantities are fused to provide a full relative location estimate. We used our method to tackle the problem of collision avoidance in tight areas. The system was tested with a team of AR.Drones flying in a 4mx4m area and with miniature drones of ~50g in a 2mx2m area. The MAVs were able to track their relative positions and fly several minutes without collisions. Our implementation used Bluetooth to communicate between the drones. This featured significant noise and disturbances in signal-strength, which worsened as more drones were added. Simulation analysis suggests that results can improve with a more suitable transceiver module.