 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Automatic Data Augmentation for 3D Point Cloud Classification
Paper and Code
Dec 18, 2021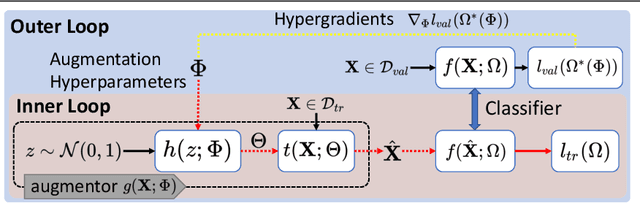
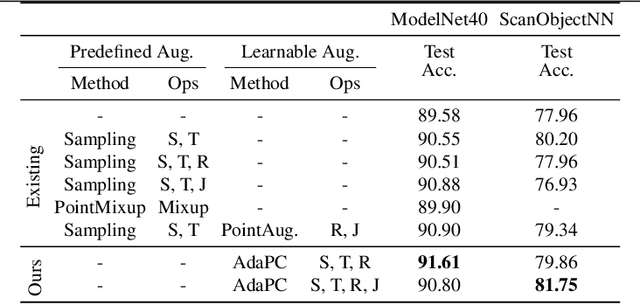


Data augmentation is an important technique to reduce overfitting and improve learning performance, but existing works on data augmentation for 3D point cloud data are based on heuristics. In this work, we instead propose to automatically learn a data augmentation strategy using bilevel optimization. An augmentor is designed in a similar fashion to a conditional generator and is optimized by minimizing a base model's loss on a validation set when the augmented input is used for training the model. This formulation provides a more principled way to learn data augmentation on 3D point clouds. We evaluate our approach on standard point cloud classification tasks and a more challenging setting with pose misalignment between training and validation/test sets. The proposed strategy achieves competitive performance on both tasks and we provide further insight into the augmentor's ability to learn the validation set distribution.