 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOG: Equip vision occupancy with instance segmentation and visual grounding
Paper and Code
Jul 12, 2023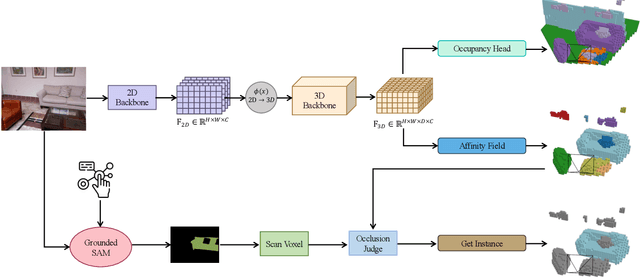
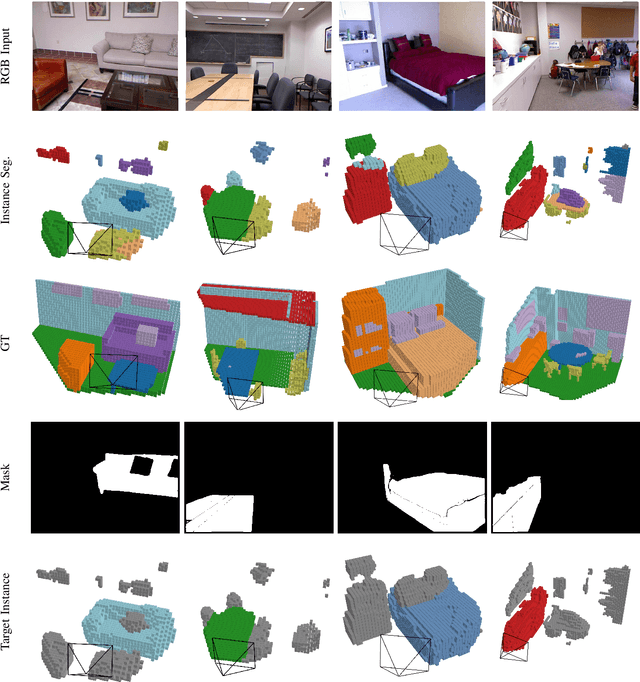
Occupancy prediction tasks focus on the inference of both geometry and semantic labels for each voxel, which is an important perception mission. However, it is still a semantic segmentation task without distinguishing various instances. Further, although some existing works, such as Open-Vocabulary Occupancy (OVO), have already solved the problem of open vocabulary detection, visual grounding in occupancy has not been solved to the best of our knowledge. To tackle the above two limitations, this paper proposes Occupancy Grounding (OG), a novel method that equips vanilla occupancy instance segmentation ability and could operate visual grounding in a voxel manner with the help of grounded-SAM. Keys to our approach are (1) affinity field prediction for instance clustering and (2) association strategy for aligning 2D instance masks and 3D occupancy instances. Extensive experiments have been conducted whose visualization results and analysis are shown below. Our code will be publicly released soon.