 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOccupancyDETR: Making Semantic Scene Completion as Straightforward as Object Detection
Paper and Code
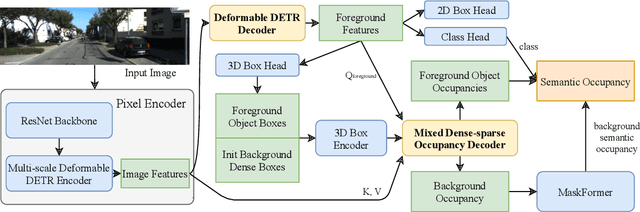
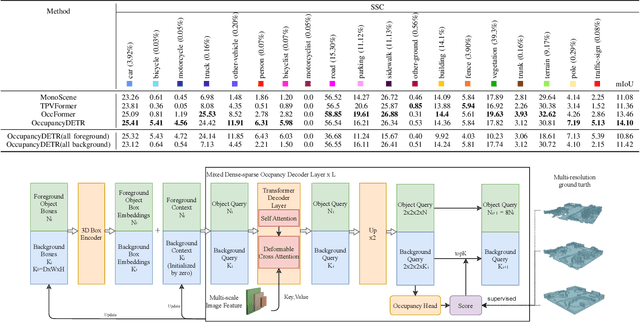
Visual-based 3D semantic occupancy perception (also known as 3D semantic scene completion) is a new perception paradigm for robotic applications like autonomous driving. Compared with Bird's Eye View (BEV) perception, it extends the vertical dimension, significantly enhancing the ability of robots to understand their surroundings. However, due to this very reason, the computational demand for current 3D semantic occupancy perception methods generally surpasses that of BEV perception methods and 2D perception methods. We propose a novel 3D semantic occupancy perception method, OccupancyDETR, which consists of a DETR-like object detection module and a 3D occupancy decoder module. The integration of object detection simplifies our method structurally - instead of predicting the semantics of each voxels, it identifies objects in the scene and their respective 3D occupancy grids. This speeds up our method, reduces required resources, and leverages object detection algorithm, giving our approach notable performance on small objects. We demonstrate the effectiveness of our proposed method on the SemanticKITTI dataset, showcasing an mIoU of 23 and a processing speed of 6 frames per second, thereby presenting a promising solution for real-time 3D semantic scene completion.