 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection for Understanding Assembly Instruction Using Context-aware Data Augmentation and Cascade Mask R-CNN
Paper and Code
Jan 08, 2021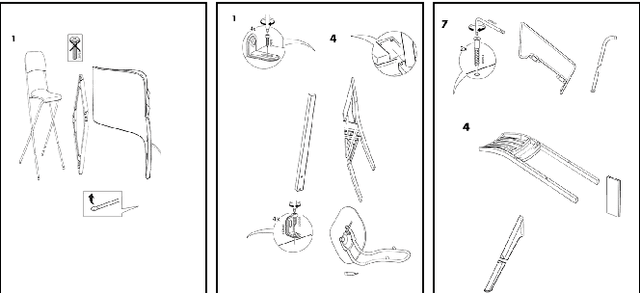
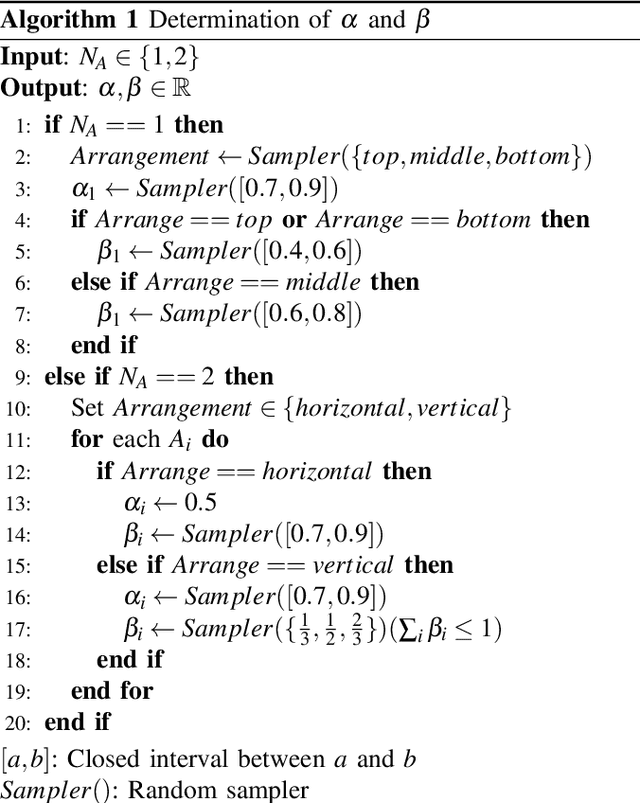
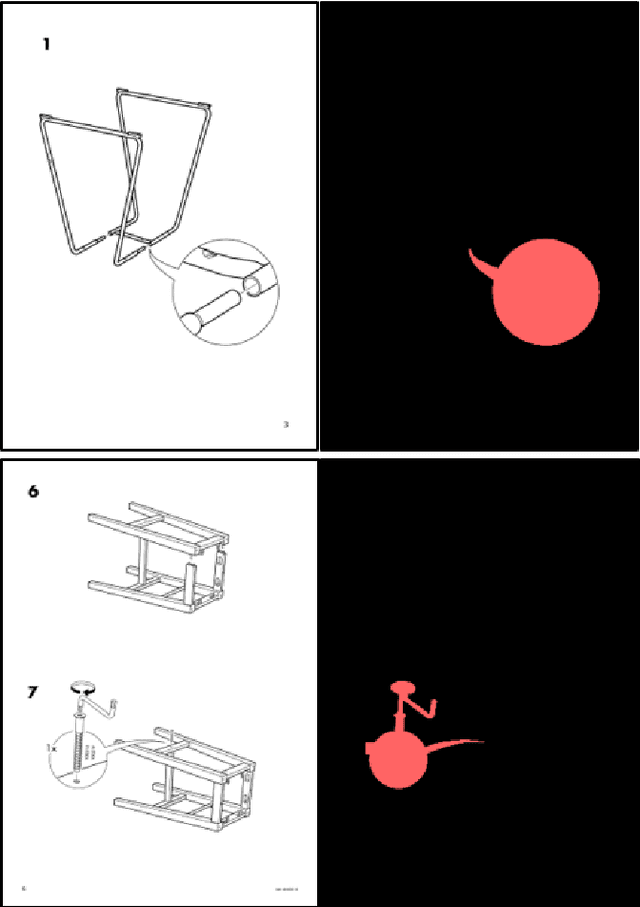
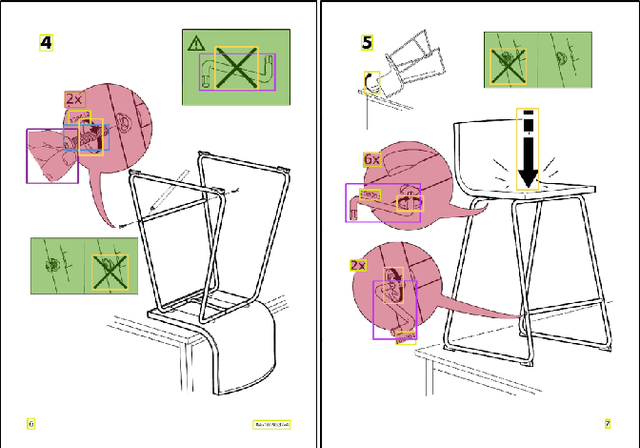
Understanding assembly instruction has the potential to enhance the robot s task planning ability and enables advanced robotic applications. To recognize the key components from the 2D assembly instruction image, We mainly focus on segmenting the speech bubble area, which contains lots of information about instructions. For this, We applied Cascade Mask R-CNN and developed a context-aware data augmentation scheme for speech bubble segmentation, which randomly combines images cuts by considering the context of assembly instructions. We showed that the proposed augmentation scheme achieves a better segmentation performance compared to the existing augmentation algorithm by increasing the diversity of trainable data while considering the distribution of components locations. Also, we showed that deep learning can be useful to understand assembly instruction by detecting the essential objects in the assembly instruction, such as tools and parts.