 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNewtonian Image Understanding: Unfolding the Dynamics of Objects in Static Images
Paper and Code
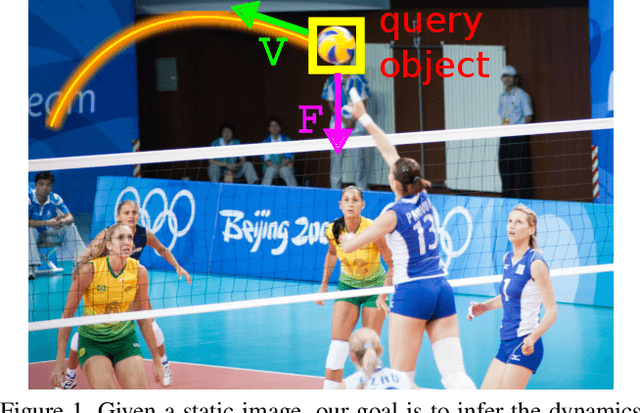

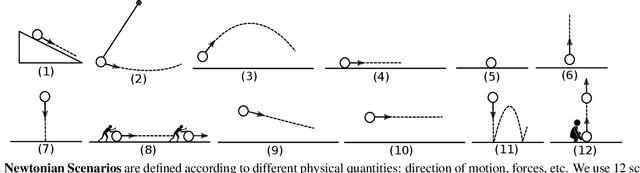
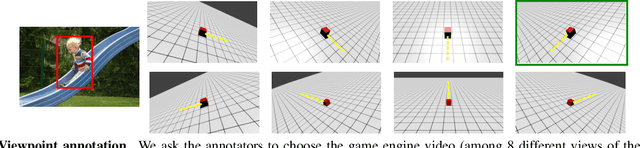
In this paper, we study the challenging problem of predicting the dynamics of objects in static images. Given a query object in an image, our goal is to provide a physical understanding of the object in terms of the forces acting upon it and its long term motion as response to those forces. Direct and explicit estimation of the forces and the motion of objects from a single image is extremely challenging. We define intermediate physical abstractions called Newtonian scenarios and introduce Newtonian Neural Network ($N^3$) that learns to map a single image to a state in a Newtonian scenario. Our experimental evaluations show that our method can reliably predict dynamics of a query object from a single image. In addition, our approach can provide physical reasoning that supports the predicted dynamics in terms of velocity and force vectors. To spur research in this direction we compiled Visual Newtonian Dynamics (VIND) dataset that includes 6806 videos aligned with Newtonian scenarios represented using game engines, and 4516 still images with their ground truth dynamics.