 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural-Swarm2: Planning and Control of Heterogeneous Multirotor Swarms using Learned Interactions
Paper and Code
Dec 10, 2020
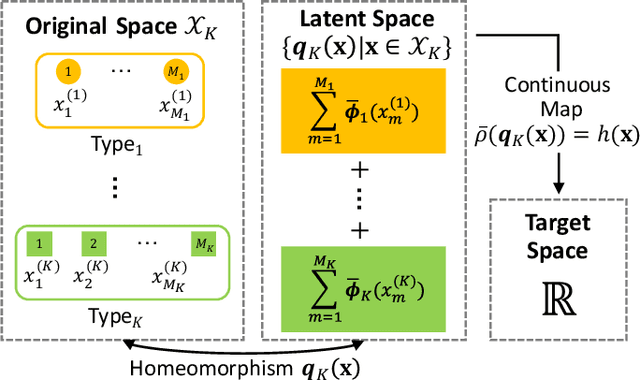

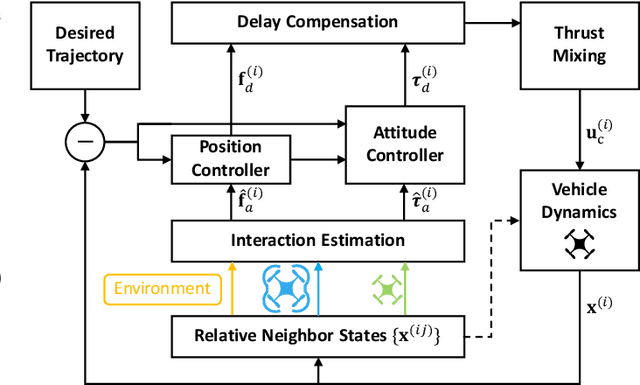
We present Neural-Swarm2, a learning-based method for motion planning and control that allows heterogeneous multirotors in a swarm to safely fly in close proximity. Such operation for drones is challenging due to complex aerodynamic interaction forces, such as downwash generated by nearby drones and ground effect. Conventional planning and control methods neglect capturing these interaction forces, resulting in sparse swarm configuration during flight. Our approach combines a physics-based nominal dynamics model with learned Deep Neural Networks (DNNs) with strong Lipschitz properties. We evolve two techniques to accurately predict the aerodynamic interactions between heterogeneous multirotors: i) spectral normalization for stability and generalization guarantees of unseen data and ii) heterogeneous deep sets for supporting any number of heterogeneous neighbors in a permutation-invariant manner without reducing expressiveness. The learned residual dynamics benefit both the proposed interaction-aware multi-robot motion planning and the nonlinear tracking control designs because the learned interaction forces reduce the modelling errors. Experimental results demonstrate that Neural-Swarm2 is able to generalize to larger swarms beyond training cases and significantly outperforms a baseline nonlinear tracking controller with up to three times reduction in worst-case tracking errors.